




Ведущий интеллектуальный беспилотник для предотвращения столкновений с препятствиями
Когда слышишь это словосочетание, первое, что приходит в голову — навороченный лидар, куча камер, софт для SLAM. Но если копнуть глубже, в саму логику работы, понимаешь, что ключевое слово здесь не ?беспилотник? и даже не ?интеллектуальный?, а ?предотвращение?. Потому что реакция на препятствие — это уже почти авария. Настоящее предотвращение — это когда система видит и оценивает угрозу за несколько циклов до того, как она станет критической, и строит траекторию, которая выглядит почти как естественное, плановое движение. И вот тут начинается самое интересное, а зачастую и самое сложное.
От теории к полю: где рождаются реальные проблемы
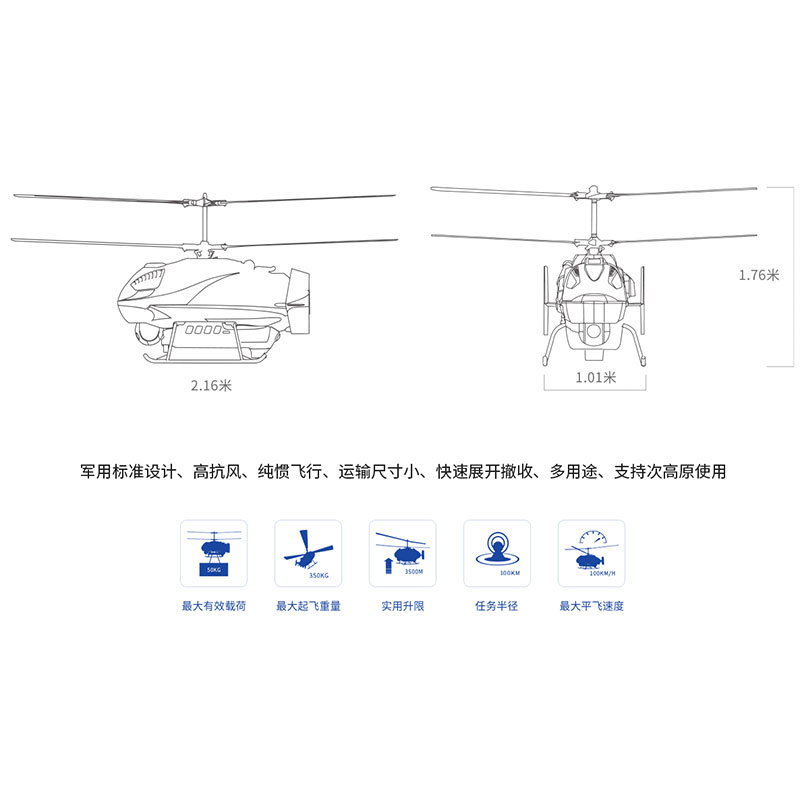
В лаборатории или на полигоне с расставленными конусами всё работает. Проблемы начинаются там, где среда неструктурированная и динамичная. Возьмём, к примеру, работу в городской среде с низкой застройкой — как раз та экономика низкогорья, на которой специализируется, скажем, OOO Технологии беспилотных летательных аппаратов Хунань Юхан. Их платформа заточена под такие сценарии. Ты летишь по заданному маршруту для мониторинга инфраструктуры, и тут ветер качает ветки деревьев в зону твоего коридора. Это не статичное препятствие из технического задания, его геометрия меняется каждую секунду. Стандартный алгоритм, увидев резкое появление объекта, может дать команду на резкий манёвр или зависание, что при порыве ветра чревато потерей стабильности. Нужна не просто фиксация, а прогноз изменения обстановки.
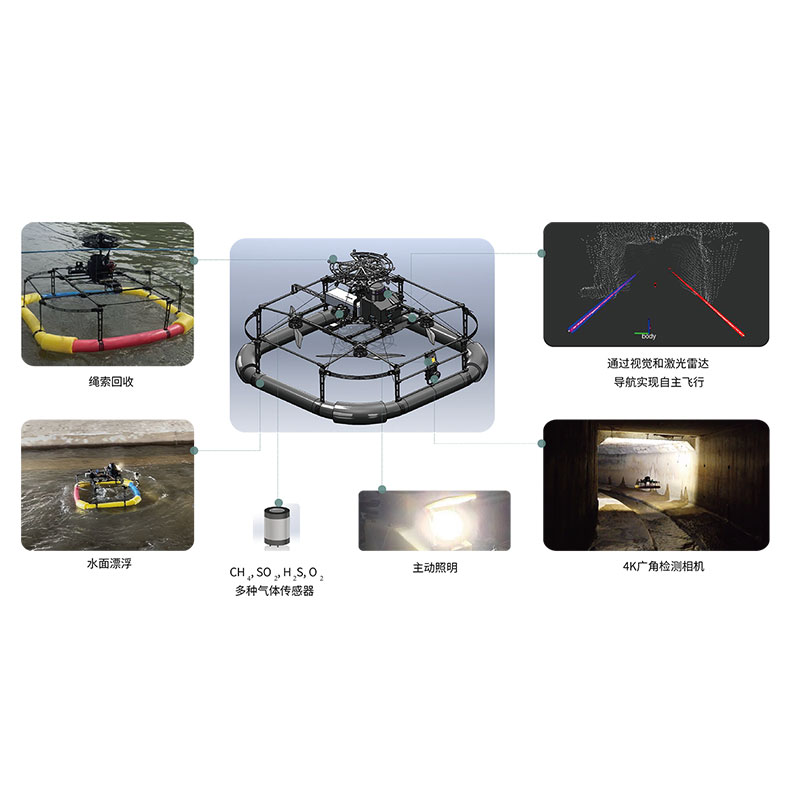
Или другой нюанс — провода. Тонкие, на фоне сложного заднего плана. Камера может не выделить их на этапе детекции, лидар — из-за малого диаметра. Комбинированные сенсорные системы, о которых все говорят, — это не панацея, а головная боль по сенсорной фузии. Как взвешивать данные? Если камера ?не видит? провод, а доплеровский радар фиксирует слабый, но протяжённый объект, чему верить? Решение часто лежит не в области железа, а в области алгоритмов машинного обучения, натренированных на специфических датасетах именно таких ?невидимых? угроз. Насколько я знаю, команда из Чанши как раз плотно работает над подобными предиктивными моделями, интегрируя их в свою сервисную платформу.
Здесь и кроется распространённая ошибка: многие стартапы гонятся за количеством ТОПСов (вычислительной мощности) или разрешением камер, думая, что это сделает систему ?интеллектуальнее?. На деле же, raw data — это ещё не информация. Интеллект начинается с контекстуальной интерпретации потока данных. Летающий в городских каньонах дрон должен ?понимать?, что движущийся объект размером с автомобиль на высоте 50 метров — это, скорее всего, строительный кран, а не летающая машина, и его траектория предсказуема. Это уровень семантического понимания, до которого многим ещё далеко.
Случай из практики: когда ?умный? дрон оказался слишком осторожным
Хочу привести пример из реального проекта по инспекции ЛЭП, не связанного напрямую с упомянутой компанией, но очень показательный. Мы использовали платформу с продвинутой системой предотвращения столкновений. Всё было отлично, пока дрон не вышел на участок в лесистой местности. Система, настроенная на агрессивный режим безопасности, начала воспринимать каждую близко расположенную ветку как непосредственную угрозу. Вместо того чтобы аккуратно облететь её по гладкой траектории, аппарат постоянно выполнял резкие стоп-манёвры, потом пытался искать длинный обходной путь, разряжая батарею.
Фактически, он предотвращал гипотетические столкновения, которых в 95% случаев не случилось бы, ценой провала основной миссии — завершения обследования маршрута. Это был классический кейс, где безопасность, доведённая до абсолюта, стала врагом эффективности. Пришлось на месте калибровать пороги чувствительности и переписывать логику приоритизации задач: завершение миссии (в разумных пределах риска) стало важнее тотального избегания всех объектов. Это тонкая грань, и её не найдёшь в документации к SDK.
После этого случая мы стали уделять больше внимания не столько ?дальнобойности? сенсоров, сколько адаптивности логического контура. Дрон должен уметь переключать ?режимы внимания? в зависимости от этапа полёта и операционной среды. На транзитном участке — один порог реакции, при работе вблизи объекта инспекции — другой. Это уже следующий уровень — контекстно-зависимое интеллектуальное управление рисками.
Интеграция в экосистему: почему платформа важнее отдельного дрона
Вот здесь хочется сделать отступление про общий подход. Создать отдельный дрон-ас для облёта препятствий — задача сложная, но ограниченная. Гораздо более масштабная задача — встроить эту способность в целую операционную экосистему. Если взглянуть на модель ?сервис+продукт+операция?, которую декларирует OOO Технологии беспилотных летательных аппаратов Хунань Юхан, становится понятно, что они движутся именно в эту сторону.
Представьте: дрон, оснащённый системой ведущий интеллектуальный беспилотник, не просто летает сам по себе. Он — источник данных для большой платформы. Каждое обнаруженное препятствие, каждый выполненный манёвр — это данные, которые загружаются в общую цифровую модель района полётов (тот самый low-altitude economy). Следующий дрон, получая задание в этом районе, уже приходит не ?вслепую?. У него есть карта не только статичных объектов, но и зон с высокой вероятностью появления динамических помех (например, та же зона с раскачивающимися деревьями). Он может заранее планировать более безопасный маршрут или быть готовым к конкретному типу угроз.
Таким образом, интеллект становится сетевым и накапливаемым. Одна машина обучается на опыте тысяч. Это уже не просто избегание столкновений, это формирование коллективного ?опыта? для всего парка, что кардинально повышает безопасность и предсказуемость операций в долгосрочной перспективе. На их сайте, если покопаться, можно найти намёки на развитие именно такой распределённой системы, где каждый полёт обогащает общую базу знаний.
Будущее: от предотвращения к кооперации
Если заглянуть чуть дальше, то эволюция систем предотвращения столкновений видится в сторону межмашинной коммуникации (V2X для беспилотников). Самый совершенный бортовой интеллект может не справиться с внезапно вылетевшим из-за угла здания другим дроном. Но если оба аппарата будут обмениваться данными о своих намерениях и траекториях через защищённый канал, необходимость в сложных экстренных манёврах отпадёт.
Это потребует не только новых протоколов связи, но и единых стандартов ?поведения? в воздушном пространстве. И здесь компании, которые уже работают не с единичными продуктами, а с сервисными платформами и экосистемами городских услуг, как раз имеют фору. Они могут закладывать эти стандарты и протоколы на архитектурном уровне.
В итоге, возвращаясь к исходному термину, ведущий интеллектуальный беспилотник для предотвращения столкновений — это уже не просто летательный аппарат с хорошим софтом. Это узел в сети, активный участник экосистемы, который не только решает свою сиюминутную задачу, но и вносит вклад в общую безопасность и эффективность. И именно такой системный взгляд, на мой практический взгляд, отличает перспективные разработки от просто ?хорошего железа?. Всё остальное — так, технические детали, которые, впрочем, тоже приходится вылизывать днями и ночами.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
 Наземный терминал 1
Наземный терминал 1 -
 Гражданский беспилотник DJI FC30
Гражданский беспилотник DJI FC30 -
 DJI First View Траверсный дрон avata2
DJI First View Траверсный дрон avata2 -
 Коробка для размотки оптоволокна 25000M
Коробка для размотки оптоволокна 25000M -
 Флагманский профессиональный ручной стабилизатор DJI для съемки DJI RS 4 Pro
Флагманский профессиональный ручной стабилизатор DJI для съемки DJI RS 4 Pro -
 DJI-RTK2 Высокоточная мобильная станция GNSS
DJI-RTK2 Высокоточная мобильная станция GNSS -
 Q3 Беспилотник для инспекции трубопроводов
Q3 Беспилотник для инспекции трубопроводов -
 Неуправляемый аэропорт DJI 2
Неуправляемый аэропорт DJI 2 -
 Воздушный терминал 1
Воздушный терминал 1 -
 DJI Промышленный высокоточный картографический дрон Matrice4E
DJI Промышленный высокоточный картографический дрон Matrice4E -
 DJI Модернизация дрона Matrice4D
DJI Модернизация дрона Matrice4D -
 Коробка для размотки оптоволокна 30000M
Коробка для размотки оптоволокна 30000M
Связанный поиск
Связанный поиск- Большой беспилотный вертолет
- Знаменитый беспроводной микрофон DJI
- Оптовые портативные источники питания отзывы
- Купить дрон с экраном
- Поставщики которые покупают спортивные мини экшн-камеры
- Основные покупатели инфракрасных тепловизионных дронов
- Поставщики ручных стабилизаторов для камер
- Дешевые спортивные камеры HD 1080p Производитель
- Купить беспилотник 3
- Высокое качество беспроводной микрофон лавальер DJI Mic