




Всенаправленный дрон для предотвращения столкновений с препятствиями
Когда слышишь ?всенаправленный дрон для предотвращения столкновений?, первое, что приходит в голову — это какая-то магия сенсоров, которая делает аппарат неуязвимым. На деле же, многие коллеги ошибочно полагают, что достаточно воткнуть кучу лидаров или стереокамер по периметру — и готово. Я сам долгое время так думал, пока не начал плотно работать с платформой OOO Технологии беспилотных летательных аппаратов Хунань Юхан. Их подход, сфокусированный на сервисе и реальных городских сценариях, быстро показал, что проблема не в количестве датчиков, а в их интеграции и, что важнее, в логике принятия решений. Именно их платформа, базирующаяся на AI и больших данных, заставила пересмотреть многие базовые представления.
Что на самом деле значит ?всенаправленный??
В теории, система должна видеть и оценивать угрозу с любой стороны — сверху, снизу, по бокам. Но на практике, особенно в условиях плотной городской застройки или среди деревьев, возникают ?слепые? зоны, которые не закрыть даже шестью лидарами. Один из наших ранних прототипов, который мы тестировали для мониторига инфраструктуры, налетал на тонкие ветки, которые просто выпадали из поля зрения между сенсорами. Это был важный урок: всенаправленный дрон — это не про идеальный охват в 360 градусов в статике, а про динамическое предсказание и компенсацию тех самых слепых зон на лету.
Здесь как раз пригодился опыт Хунань Юхан в разработке приложений и их бизнес-модель ?сервис+продукт+операция?. Они изначально закладывали в алгоритмы не просто карту препятствий, а вероятностные модели их появления — например, внезапно открывающаяся дверь на крыше или птица, меняющая траекторию. Это уже уровень не просто предотвращения столкновений, а предиктивной аналитики.
Кстати, их сайт — https://www.uavhunan.ru — хорошо отражает эту философию: много про низкогорную экономику и распределенные городские сервисы, то есть про работу в сложной, неконтролируемой среде. Для всенаправленных систем это и есть полигон.
Аппаратная часть: сенсорный коктейль и его подводные камни
Стандартный набор — оптические камеры, ИК-камеры, ультразвук, лидар. Казалось бы, бери больше — кидай дальше. Но вес, энергопотребление и, главное, конфликты данных между разными типами сенсоров сводят на нет все преимущества. Мы пробовали ставить на один каркас и лидар, и стереокамеры для ближней дистанции. В ясный день всё работало отлично, но в лёгкий туман или при контровом свете лидар начинал ?видеть? туман как плотное препятствие, а камеры слепли. Дрон просто зависал, не решаясь лететь дальше.
Решение, которое стало для нас переломным, пришло из архитектуры, которую продвигает OOO Технологии беспилотных летательных аппаратов Хунань Юхан. Они делают ставку не на дублирование, а на гибридную, адаптивную систему. Например, в чистом поле приоритет отдаётся оптике и ультразвуку для скорости, а при заходе в зону с деревьями или проводами — плавно подключается и калибруется лидар. Это требует серьёзной работы с большими данными для обучения моделей, чем компания как раз и занимается.
Важный нюанс — охлаждение и вибрация. Сенсоры, особенно точные, крайне чувствительны к перегреву и микровибрациям от моторов. Не один образец у нас вышел из строя не из-за софта, а из-за банального теплового расширения платы внутри корпуса. Мелочь, которая часто упускается из виду в погоне за ?навороченным? функционалом.
Софт и логика: где происходит настоящее предотвращение
Можно иметь лучшие в мире сенсоры, но если система управления не умеет быстро интерпретировать их сигналы и принимать решение — толку ноль. Здесь мы упираемся в вопросы латентности и приоритизации угроз. Самая сложная задача для дрона для предотвращения столкновений — не объехать статичное дерево, а среагировать на внезапно появившийся объект, движущийся с высокой скоростью (другой дрон, птица).
В рамках одного из совместных с Хунань Юхан пилотов по мониторингу линий электропередач в районе Фуронг мы как раз столкнулись с такой ситуацией. Аппарат шёл вдоль проводов, система была сфокусирована на них, и сбоку, из-за бетонной опоры, вылетела стая птиц. Стандартная логика предписала бы резко отклониться в сторону, но там были как раз те самые провода. Алгоритм, доработанный их инженерами, пошёл по пути минимального манёвра — не в сторону, а вверх, с почти одновременным разворотом для переоценки обстановки. Сработало. Это тот самый пример, когда предотвращение — это не уход от столкновения любой ценой, а выбор наименее рискованной траектории в условиях неполной информации.
Именно их фокус на ?экономике низкогорья? подразумевает постоянную работу с подобными нестандартными, быстро меняющимися сценариями, что и оттачивает софт.
Реальные кейсы и границы возможного
Говорить о технологиях абстрактно бесполезно. Возьмём конкретный пример — инспекция фасадов высотных зданий в том же Чанша. Задача: автономный облёт с фиксацией дефектов. Препятствия — не только сам фасад, но и строительные леса, кондиционеры, открывающиеся окна, балконы с навесами. Идеальный полигон для всенаправленного дрона.
Наш первый заход закончился тем, что дрон, старательно обходя балконные решётки, ?не заметил? тонкой телевизионной антенны и зацепил её. Система воспринимала её как шум на фоне сложной текстуры стены. Потребовалось дообучать нейросеть именно на распознавание таких тонких, малоконтрастных объектов на фоне ?шумного? фона. Это кропотливая работа по сбору датасетов, которой активно занимается команда Хунань Юхан как часть своей сервисной платформы.
Другой кейс — работа внутри складских помещений с узкими проходами между стеллажами. Здесь проблема — навигация в условиях слабого или отсутствующего GPS и необходимость избегать не только статичных полок, но и погрузчиков, людей. Тут сработала комбинация UWB-меток для позиционирования (часть их системы распределенных городских услуг) и уже упомянутой гибридной сенсорики. Но признаюсь, до полной автономии в таких условиях ещё далеко — часто требуется дистанционное участие оператора для оценки сложных ситуаций.
Будущее: интеграция в экосистему, а не просто продукт
Сам по себе дрон, даже самый совершенный, — это лишь инструмент. Его реальная ценность раскрывается, когда он становится частью более крупной системы. Вот почему мне близка модель OOO Технологии беспилотных летательных аппаратов Хунань Юхан, которая позиционирует себя именно как сервисная платформа. Их идея ?сервис+продукт+операция? для распределенных городских услуг — это и есть дорожная карта для развития технологии предотвращения столкновений.
Представьте себе сеть дронов, выполняющих разные задачи в городе — от доставки до мониторинга. Каждый из них — это всенаправленный дрон для предотвращения столкновений, но главное — они обмениваются данными об обстановке в реальном времени через единую платформу. Если один аппарат обнаружил новое временное препятствие (например, кран), эта информация мгновенно становится доступна всем другим в этом районе. Это следующий логический шаг, который кратно повышает безопасность.
Именно над созданием такой экосистемы, основанной на AI и больших данных, и работает компания, базирующаяся на пятом этаже здания Минвэй. Их подход — не продать ?железо?, а внедрить работающее, адаптивное решение, встроенное в городскую или отраслевую инфраструктуру. Для технологии предотвращения столкновений это единственно верный путь, потому что статические алгоритмы рано или поздно проиграют динамике реального мира. А значит, и развитие будет идти не столько в сторону новых сенсоров, сколько в сторону более умных, сетевых и предсказывающих систем, которые учатся на данных со всего парка аппаратов. Вот о чём, по-моему, стоит думать сейчас.
Соответствующая продукция
Соответствующая продукция





Самые продаваемые продукты
Самые продаваемые продукты-
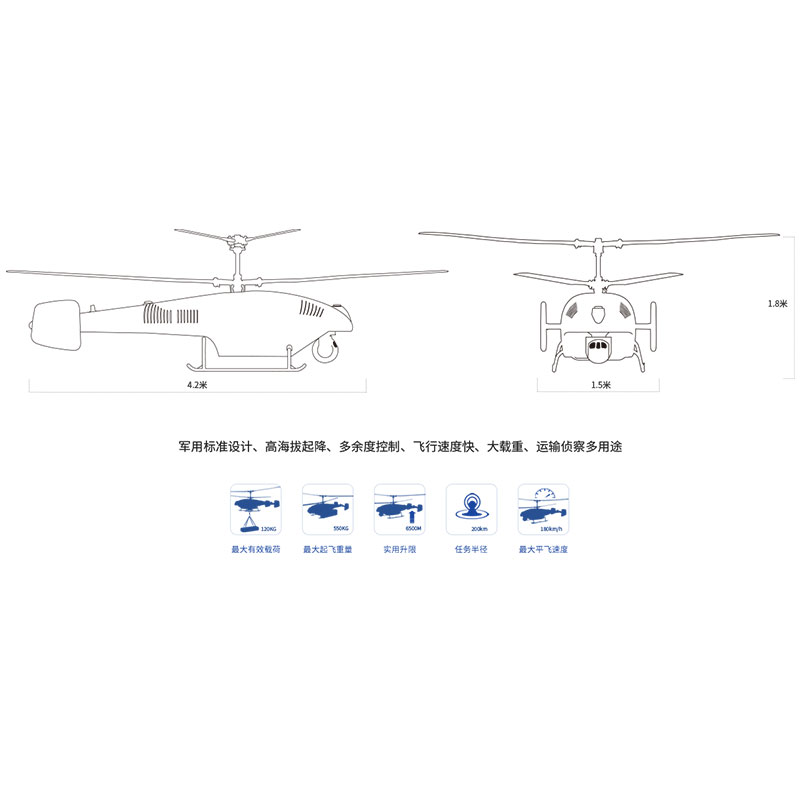 Большой грузовой беспилотный вертолет TD550
Большой грузовой беспилотный вертолет TD550 -
 Коробка для размотки оптоволокна 15000M
Коробка для размотки оптоволокна 15000M -
 DJI Легкий самодельный стабилизатор DJI RS 4 Mini
DJI Легкий самодельный стабилизатор DJI RS 4 Mini -
 Неуправляемый аэропорт DJI 2
Неуправляемый аэропорт DJI 2 -
 H2L Ручное оборудование для обнаружения и позиционирования дронов
H2L Ручное оборудование для обнаружения и позиционирования дронов -
 Оптическое волокно G657A2
Оптическое волокно G657A2 -
 Гражданский беспилотник DJI FC30
Гражданский беспилотник DJI FC30 -
 DJI Ручной мобильный гим-бал стабилизатор Osmo Mobile SE
DJI Ручной мобильный гим-бал стабилизатор Osmo Mobile SE -
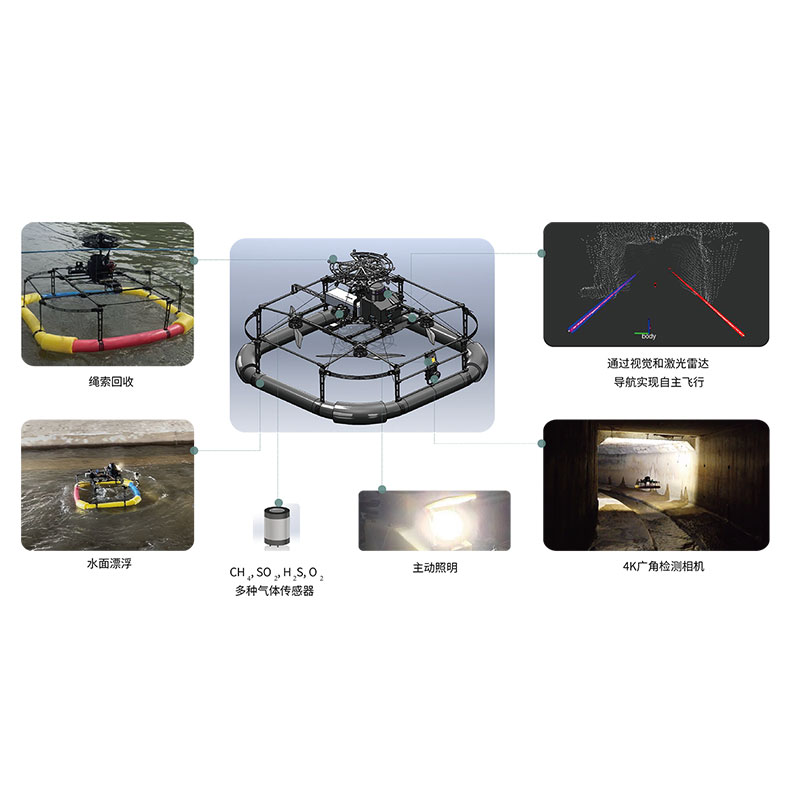 Q3 Беспилотник для инспекции трубопроводов
Q3 Беспилотник для инспекции трубопроводов -
 Многофункциональная базовая станция DJI-RTK3
Многофункциональная базовая станция DJI-RTK3 -
 Коробка для размотки оптоволокна 50000M
Коробка для размотки оптоволокна 50000M -
 DJI Промышленный высокоточный картографический дрон Matrice4E
DJI Промышленный высокоточный картографический дрон Matrice4E
Связанный поиск
Связанный поиск- Создатели дронов фото
- Поставщики m60r 5k спортивных камер
- Завод спортивных мини-камер
- Купить Высокоточный картографический дрон
- Топ покупателей профессиональных дронов для промышленности
- Знаменитый беспроводной микрофон Лавальер для камер
- Высококачественные инспекционные беспилотники
- беспроводной петличный микрофон для камеры
- Ведущий покупатель знаменитых спортивных камер m60r 5k 30fps 50m
- Ведущая портативная электростанция Источники питания