




Дроны с функцией позиционирования
Когда говорят про дроны с функцией позиционирования, многие сразу представляют себе просто летательный аппарат с GPS-модулем. Но это, пожалуй, самое большое упрощение и ошибка в восприятии. На практике, точное позиционирование — это целый комплекс систем, где спутниковый сигнал — лишь одна, и не всегда надежная, составляющая. Особенно в городской среде, среди высотных зданий, или при работе в закрытых пространствах, типа цехов или складов. Тут уже в дело вступают оптические сенсоры, лидары, ультразвуковые датчики, а в последнее время все чаще — технологии на основе визуальной одометрии (VIO). Именно комплексность подхода определяет, будет ли дрон действительно стабильно висеть в заданной точке с сантиметровой точностью или начнет ?дрейфовать?, что для многих задач, например, инспекции или точного опрыскивания, совершенно неприемлемо.
Где спутников мало: опыт работы в сложных средах
Помню один из первых наших проектов по мониторингу строительства тоннеля в горной местности. Задача — регулярная аэрофотосъемка для контроля объемов выработки. Стандартные GPS-дроны на входе в тоннель сразу теряли сигнал и отказывались лететь вглубь на автономном режиме. Ситуация типичная, но клиенту нужно решение. Тогда мы как раз тестировали платформу от одной китайской компании — OOO Технологии беспилотных летательных аппаратов Хунань Юхан. Они позиционировали себя как сервисная платформа, ориентированная именно на экономику низких высот и комплексное применение дронов, что для нашей задачи было ключевым.
Их инженеры предложили не просто дрон, а связку: аппарат с тройной системой навигации — GPS+ГЛОНАСС, оптический потоковый датчик для позиционирования по поверхности при потере спутников и ультразвуковой сенсор для точного удержания высоты вблизи земли или потолка. В теории звучало хорошо. На практике в том же тоннеле, где стены были относительно однородными и плохо освещенными, оптический сенсор тоже ?слеп?. Пришлось импровизировать — заранее размечать по стенам контрастные метки, по которым камера могла бы ориентироваться. Это был костыль, но он сработал. Главный вывод — универсального решения для всех сценариев позиционирования нет, всегда нужна адаптация под среду.
Кстати, сайт этой компании, https://www.uavhunan.ru, полезно просмотреть именно для понимания их подхода. Они не просто продают железо, а делают акцент на сервисной модели ?сервис+продукт+операция?, что намекает на готовность подстраиваться под конкретные задачи клиента, включая и нестандартные требования к навигации. Это важно, потому что купить дрон с маркировкой ?точное позиционирование? может каждый, а вот получить работающее решение для сложных условий — уже вопрос экспертизы.
Визуальное позиционирование: панацея или головная боль?
Сейчас почти все производители потребительских и профессиональных дронов хвастаются системами визуального позиционирования. Но мало кто из пользователей вникает, как это работает на самом деле. По сути, камера, смотрящая вниз, анализирует текстуру поверхности и отслеживает смещение пикселей. Все хорошо, пока поверхность имеет контрастный, статичный узор — асфальт, трава, плитка. А теперь представьте полет над гладкой водой, чистым снегом, однотонным бетонным полом склада или, что еще хуже, над движущейся конвейерной лентой. Система просто теряет опорные точки, и дрон начинает вести себя непредсказуемо — либо зависает, не решаясь лететь, либо, что опаснее, начинает дрейфовать, думая, что он движется, хотя на самом деле стоит на месте относительно земли.
У нас был случай на агропредприятии при картировании полей. Дрон взлетел над участком, который только что вспахали. Ровная, темная, практически без текстуры земля. Визуальный позиционионер отказал, аппарат перешел на резервный GPS, но точность удержания по вертикали упала. В итоге, высота полота немного ?плавала?, что потом вылилось в погрешность при построении ортофотоплана. Пришлось перелетывать, но уже с ручным контролем высоты по барометрическому датчику. Опыт показал, что всегда нужно заранее оценивать ландшафт и иметь план Б на случай отказа основной системы позиционирования.
Здесь опять вспоминается подход компаний вроде OOO Технологии беспилотных летательных аппаратов Хунань Юхан. Их фокус на применении беспилотной индустрии, основанной на интеллекте AI и больших данных, теоретически должен вести к созданию более ?умных? систем, которые могли бы заранее анализировать данные о местности и предлагать оптимальный режим навигации. Пока это больше перспектива, но направление мысли правильное.
RTK и PPK: когда нужны сантиметры, а не метры
Для геодезии, точного земледелия, разметки строительных площадок стандартной точности GPS/ГЛОНАСС (погрешность 1-3 метра) категорически недостаточно. Здесь в игру вступают технологии кинематики в реальном времени (RTK) и постобработки (PPK). Суть — использование базовой станции с точно известными координатами для корректировки сигнала со спутников, что позволяет добиться точности в 1-2 сантиметра по горизонтали и вертикали. Это уже серьезный инструмент.
Работая с RTK, сталкиваешься с другими нюансами. Во-первых, нужна линия радиосвязи между дроном и базовой станцией. В условиях пересеченной местности или городской застройки она может прерываться. Во-вторых, настройка и калибровка системы — процесс не для новичка. Помогает, когда поставщик, как та же OOO Технологии беспилотных летательных аппаратов Хунань Юхан, предлагает не просто оборудование, а именно сервисную платформу. То есть, они могут обеспечить не только аппаратуру, но и консультацию по ее развертыванию, калибровке, а возможно, и доступ к сети поправок. Это снижает порог входа для компаний, которым нужна высокая точность, но нет своего геодезиста.
Один из наших успешных кейсов с использованием RTK — регулярный мониторинг объемов сыпучих материалов на угольном складе. Точность в сантиметры позволила reliably отслеживать приход и расход, минимизируя человеческий фактор и ошибки. Дрон с RTK-модулем просто летал по заданному маршруту раз в неделю, а мы получали точную 3D-модель и расчет кубатуры. Ключевым было именно стабильное позиционирование в каждой точке маршрута, без которого все расчеты теряли смысл.
Интеграция с другими системами: где живет реальная ценность
Само по себе точное удержание точки в воздухе — это крутая технологическая фича, но не конечная цель. Цель — решить бизнес-задачу. И здесь на первый план выходит интеграция системы позиционирования дрона с другим софтом и аппаратурой. Например, для тепловизионной инспекции солнечных панелей или ЛЭП критично не только точно зависнуть напротив объекта, но и синхронизировать данные о местоположении с каждым тепловым снимком. Чтобы потом на карте можно было кликнуть на точку и увидеть, какая именно панель имеет перегрев.
Или взять точное земледелие. Дрон с мультиспектральной камерой и точным RTK-позиционированием строит карту вегетационных индексов (NDVI). Но ценность этой карты раскрывается только когда ее можно загрузить в автопилот сельхозтехники для дифференцированного внесения удобрений. Здесь нужна не просто точность полета, а точность геопривязки данных, их совместимость с другими форматами. Это уже уровень экосистемы, а не отдельного устройства.
Именно на создание такой экосистемы, судя по описанию, нацелена компания из Чанши. Их бизнес-модель ?распределенных городских услуг? и ?система расширения возможностей? предполагает, что дрон с его системами навигации — это лишь один узел в более крупной сети сбора и обработки данных для городского хозяйства, логистики, безопасности. В таком контексте функция позиционирования становится фундаментальной, обеспечивающей достоверность всех последующих данных и решений.
Будущее: автономия и отказоустойчивость
Куда все движется? Очевидно, к большей автономии и отказоустойчивости систем навигации. Исследования в области SLAM (одновременная локализация и картографирование), где дрон строит карту неизвестного пространства в реальном времени и ориентируется по ней, уже дают плоды. Это будущее для работы внутри зданий, шахт, на заводах.
Но для массового применения в той же ?экономике низких высот? важнее другое — создание гибридных, адаптивных систем. Таких, которые бы в реальном времени комбинировали данные со всех доступных источников: спутники, визуальные датчики, лидары, сигналы сотовых вышек (в перспективе), заранее загруженные 3D-карты местности. И делали это надежно, без сбоев. Это сложная инженерная задача, требующая мощной алгоритмической базы, как раз на стыке AI и больших данных.
Платформы, которые смогут предложить не просто дрон, а готовое, адаптивное и надежное решение для навигации под конкретный кластер задач (город, сельское хозяйство, промышленность), будут определять рынок. Судя по их заявленным компетенциям, OOO Технологии беспилотных летательных аппаратов Хунань Юхан движется в этом направлении, делая ставку на сервис и комплексные решения. Для конечного пользователя, будь то муниципальная служба или агрохолдинг, это может оказаться важнее, чем технические характеристики отдельно взятого аппарата. Ведь в итоге нужен не дрон с функцией позиционирования, а гарантированный результат на земле — будь то сэкономленные ресурсы, предотвращенная авария или вовремя собранный урожай.
Соответствующая продукция
Соответствующая продукция







Самые продаваемые продукты
Самые продаваемые продукты-
 DJI SDR Mapping
DJI SDR Mapping -
 Коробка для размотки оптоволокна 1-20kM
Коробка для размотки оптоволокна 1-20kM -
 DJI Легкий самодельный стабилизатор DJI RS 4 Mini
DJI Легкий самодельный стабилизатор DJI RS 4 Mini -
 Q5 Дрон для осмотра тоннелей
Q5 Дрон для осмотра тоннелей -
 DJI мини беспроводной микрофон mic2
DJI мини беспроводной микрофон mic2 -
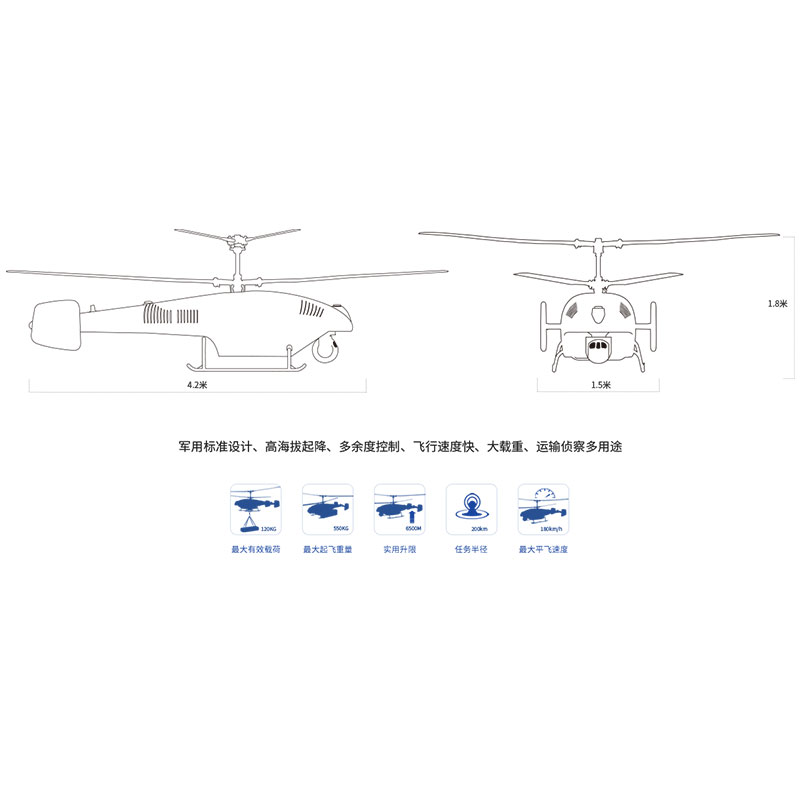 Большой грузовой беспилотный вертолет TD550
Большой грузовой беспилотный вертолет TD550 -
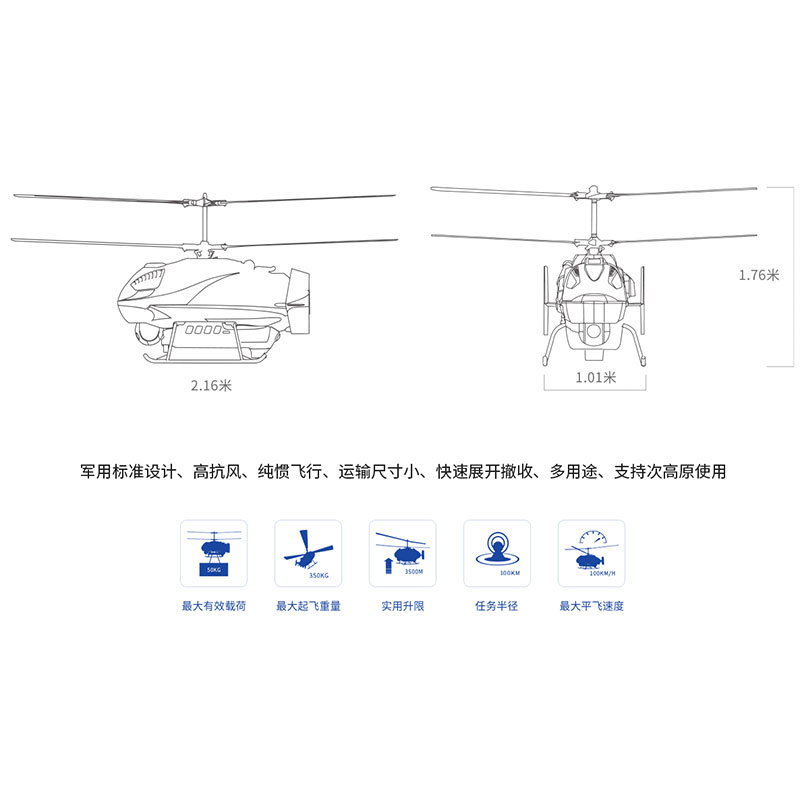 Соосный малый беспилотный вертолет TD220
Соосный малый беспилотный вертолет TD220 -
 H2L Ручное оборудование для обнаружения и позиционирования дронов
H2L Ручное оборудование для обнаружения и позиционирования дронов -
 DJI HD ручной влоггинг воздушный дрон neo
DJI HD ручной влоггинг воздушный дрон neo -
 DJI Спортивная камера Osmo Action 5 Pro
DJI Спортивная камера Osmo Action 5 Pro -
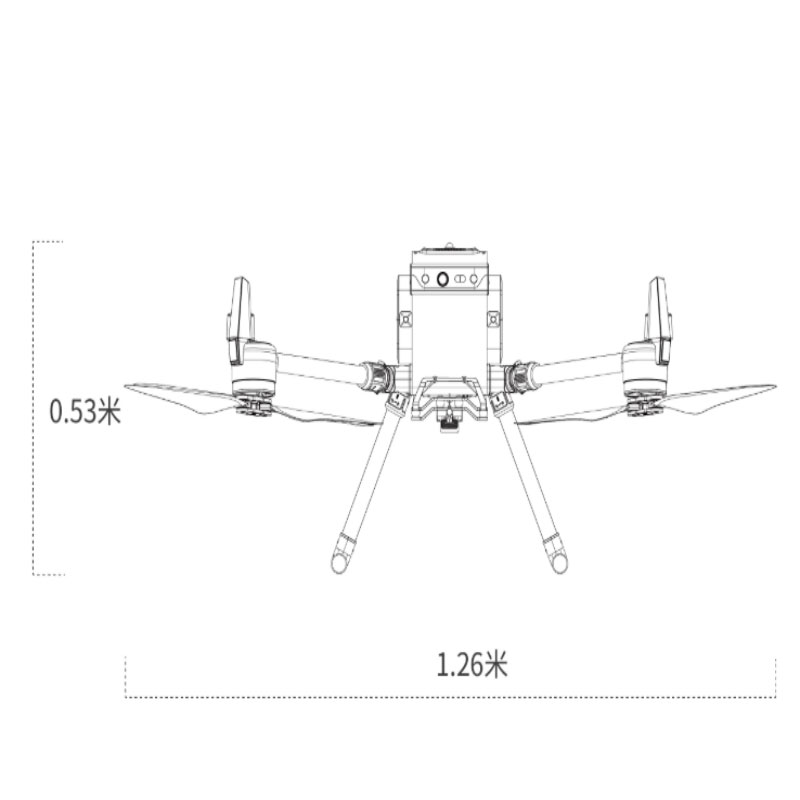 Летная платформа для квадрокоптеров Q20 Объединенные самолеты
Летная платформа для квадрокоптеров Q20 Объединенные самолеты -
 Инфракрасный тепловизор для дронов DJI Matrice4TD
Инфракрасный тепловизор для дронов DJI Matrice4TD
Связанный поиск
Связанный поиск- Знаменитый дрон для осмотра тоннелей
- Поставщики квадрокоптеров
- Ведущий покупатель мини экшн-камер для спорта
- Заводы по производству беспилотников в России
- Цена на DJI pocket3 карманная камера
- Топ компаний по продаже оборудования для обнаружения и управления дронами
- Производитель оптического волокна g657a2
- Дешевые Карманная камера с ручным карданом
- Знаменитые беспилотные летательные аппараты
- портативная аккумуляторная электростанция