




Поставщики беспилотных летательных аппаратов с GPS для предотвращения столкновений с препятствиями
В последнее время всё больше разговоров о беспилотных летательных аппаратах с GPS, особенно в контексте автономного полета и промышленной автоматизации. Часто встречаю мнение, что наличие GPS гарантирует безопасность и полную независимость от человеческого вмешательства. Это, конечно, упрощение. Давайте разберемся, что на самом деле стоит учитывать при использовании дронов для предотвращения столкновений.
GPS – это только часть истории
Первое, что нужно понимать – GPS дает лишь приблизительное местоположение. В городских условиях, в частности, с высокими зданиями по обе стороны, сигнал может быть слабым или вовсе отсутствовать. В таких случаях полагаться только на GPS – верный способ попасть в неприятную ситуацию. Мы, например, однажды тестировали дрон на складе с высокими стеллажами, и он буквально 'застрял', постоянно пытаясь найти сигнал. Понятно, что автоматическая остановка по GPS в этой ситуации была неэффективной. Именно поэтому сейчас уделяется все больше внимания другим системам навигации и сенсорам.
Инерциальные системы навигации (INS)
INS – это системы, которые определяют положение и ориентацию аппарата, используя акселерометры и гироскопы. Это позволяет дрону двигаться даже в условиях отсутствия GPS-сигнала. Но INS со временем накапливают ошибки, что требует периодической коррекции. Особенно это актуально для длительных полетов. Как показывает практика, настройка и калибровка INS – это целый процесс, требующий опыта и понимания принципов работы.
Системы предотвращения столкновений на основе камер и лидаров
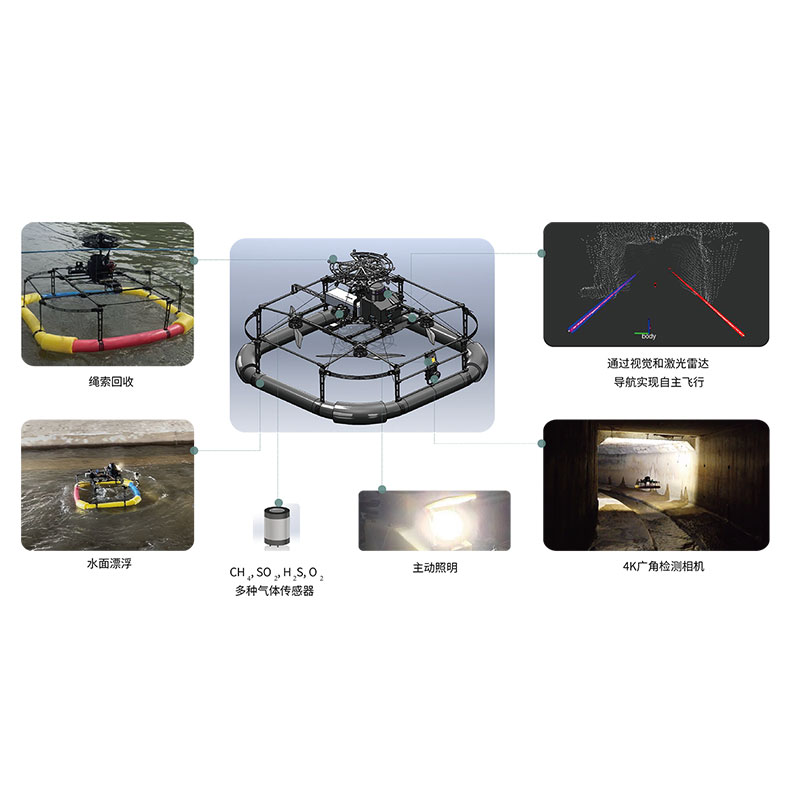
Один из самых перспективных подходов – использование камер и лидаров для создания трехмерной карты окружающего пространства. Дрон буквально 'видит' препятствия и автоматически корректирует траекторию полета. Такие системы, как правило, обеспечивают гораздо более точное и надежное предотвращение столкновений, чем GPS в одиночку. Но здесь есть свои сложности: требуются мощные вычислительные ресурсы для обработки данных, а также сложные алгоритмы для распознавания и классификации препятствий. Например, мы работали с системой, основанной на лидаре, и заметили, что в условиях плотного тумана она работает менее эффективно, чем в ясную погоду. Это нужно учитывать при проектировании системы безопасности.
Практический опыт: Проблемы и решения
Во время разработки системы автоматизированной доставки грузов, мы столкнулись с проблемой 'видимых' препятствий, которые система не распознавала. Оказалось, что маленькие объекты, например, ветки деревьев или мусор, не попадали в поле зрения камеры или лидара. Чтобы решить эту проблему, мы добавили дополнительный датчик – ультразвуковой дальномер. Это позволило дрону обнаруживать объекты, которые не были видны другим сенсорам.
Обновление программного обеспечения и алгоритмов
Не стоит забывать о важности регулярного обновления программного обеспечения и алгоритмов. Производители дронов постоянно работают над улучшением своих систем безопасности, и новые обновления могут значительно повысить их эффективность. Мы регулярно тестируем обновления от разных производителей и всегда следим за новостями в этой области. Иначе, можно столкнуться с ситуацией, когда новая версия прошивки, предназначенная для улучшения безопасности, неожиданно создает новые проблемы.
Выбор подходящего решения
Не существует универсального решения для предотвращения столкновений с препятствиями. Выбор подходящей системы зависит от конкретной задачи и условий эксплуатации. Для простых задач, например, для полетов на небольшие расстояния в открытой местности, может быть достаточно GPS. Но для более сложных задач, таких как автоматизированная доставка грузов в городских условиях, потребуются более продвинутые системы, основанные на комбинации различных сенсоров и алгоритмов. Например, система от ООО Технологии беспилотных летательных аппаратов Хунань Юхан, основанная на ИИ и многоуровневой сенсорной системе, сейчас демонстрирует отличные результаты в условиях городской среды.
Важность резервирования систем
В идеале, система безопасности должна быть резервированной. Например, помимо основной системы предотвращения столкновений, должна быть предусмотрена резервная система, которая активируется в случае отказа основной. Это может быть, например, ручное управление дроном оператором. Это не всегда возможно или экономически целесообразно, но в критических ситуациях может спасти ситуацию.
Будущее беспилотных летательных аппаратов с GPS
В будущем мы можем ожидать появления еще более продвинутых систем предотвращения столкновений, основанных на машинном обучении и искусственном интеллекте. Эти системы будут способны предвидеть опасные ситуации и автоматически принимать решения о маневрировании. Кроме того, будут развиваться системы совместной работы дронов, которые будут обмениваться информацией о препятствиях и координировать свои действия. В конечном итоге, все это приведет к повышению безопасности и надежности беспилотных полетов.
Ключевые направления развития
Сейчас особенно активно развивается направление беспилотные летательные аппараты с GPS, интегрированные с системами сетевого взаимодействия, что открывает новые возможности для координации и обеспечения безопасности в сложных условиях. Развитие автономной навигации, особенно в условиях ограниченной видимости, также является приоритетной задачей. В OOO Технологии беспилотных летательных аппаратов Хунань Юхан мы активно занимаемся исследованиями в этих областях, стремясь к созданию максимально безопасных и эффективных решений для наших клиентов.
Соответствующая продукция
Соответствующая продукция






Самые продаваемые продукты
Самые продаваемые продукты-
 Гражданский беспилотник DJI FC30
Гражданский беспилотник DJI FC30 -
 Q3 Беспилотник для инспекции трубопроводов
Q3 Беспилотник для инспекции трубопроводов -
 Мавик 4про
Мавик 4про -
 X1D TDOA+AOA Устройство позиционирования слияния
X1D TDOA+AOA Устройство позиционирования слияния -
 DJI Легкий самодельный стабилизатор DJI RS 4 Mini
DJI Легкий самодельный стабилизатор DJI RS 4 Mini -
 DJI-RTK2 Высокоточная мобильная станция GNSS
DJI-RTK2 Высокоточная мобильная станция GNSS -
 Сельскохозяйственный беспилотник DJI T100
Сельскохозяйственный беспилотник DJI T100 -
 DJI Ручной мобильный гим-бал стабилизатор Osmo Mobile SE
DJI Ручной мобильный гим-бал стабилизатор Osmo Mobile SE -
 Q5 Дрон для осмотра тоннелей
Q5 Дрон для осмотра тоннелей -
 DJI мини беспроводной микрофон DJI Mic Mini
DJI мини беспроводной микрофон DJI Mic Mini -
 DJI Pocket Гимбал влог-камера Osmo Pocket 3
DJI Pocket Гимбал влог-камера Osmo Pocket 3 -
 DJI Matrice 400
DJI Matrice 400
Связанный поиск
Связанный поиск- Поставщики которые купили больше чем дроны
- Карманная камера
- Цены на спортивные камеры HD 1080p
- купить спортивную камеру
- Отличная портативная электростанция источник питания
- Высокое качество HD камеры для спорта
- Поставщики беспилотников
- Лучшие покупатели беспилотных летательных аппаратов в Китае
- Дешевые беспилотники сегодня
- Дрон для осмотра тоннелей из Китая