




Поставщики всенаправленных беспилотников для предотвращения столкновений
Всенаправленные беспилотники… Звучит многообещающе, правда? Часто в разговорах об их применении акцент делается на съемку, доставку, инспекции. А вот задача предотвращения столкновений, особенно в условиях плотной городской среды или сложных ландшафтов, часто остается в тени. Это, пожалуй, упущенная возможность. Я бы сказал, что сейчас происходит переход от простого 'летает-не летает' к 'летает безопасно-не безопасно', и именно здесь нужны серьезные решения.
Проблема координации в сложной среде
С одной стороны, у нас есть все больше беспилотников, выполняющих различные задачи. С другой – недостаточно эффективные системы их координации. Ранее мы сталкивались с ситуациями, когда два дрона, выполняющих, казалось бы, разные задачи, оказывались в непосредственной близости друг от друга, создавая потенциально опасную ситуацию. Это особенно актуально в условиях нерегулируемого воздушного пространства, где сложно предсказать траекторию полета каждого аппарата.
Просто добавление датчиков и алгоритмов обхода препятствий – это не панацея. Вопрос не только в том, *обнаружить* препятствие, но и в том, *сделать вывод* о его значимости и *адекватно* реагировать на него, не создавая при этом новых проблем, например, столкновения с другими дронами, пытающимися обойти то же самое препятствие. Это сложная задача, требующая комплексного подхода.
Ключевые компоненты системы безопасности
В контексте **предотвращения столкновений**, я бы выделил несколько ключевых компонентов, которые должны присутствовать в современной системе управления дронами. Это, прежде всего, надежные датчики, позволяющие собирать информацию об окружающей среде. И это не только ультразвуковые или оптические сенсоры. Инфракрасная камера, лидары, радары – все они могут играть важную роль в создании полной картины происходящего. Важно, чтобы эти датчики были не только чувствительными, но и устойчивыми к различным погодным условиям.
Затем – мощный процессор, способный обрабатывать огромные объемы данных в режиме реального времени. Алгоритмы должны быть достаточно 'умными', чтобы не просто реагировать на возникшую ситуацию, но и прогнозировать возможные сценарии развития событий. Здесь все больше внимания уделяется использованию машинного обучения – позволяет создавать системы, которые 'учатся' на опыте и становятся более эффективными со временем. Хотя, конечно, абсолютной надежности пока достичь сложно. Недавний случай с дроном, который 'не понял' препятствие в тумане, отлично это иллюстрирует. Ошибки случаются, и они могут быть очень дорогими.
Обмен данными и распределенное управление
Еще один важный аспект – эффективный обмен данными между дронами и между дронами и центральной системой управления. В идеале, все дроны должны 'знать' о местоположении и намерениях друг друга. Это требует использования надежных каналов связи и протоколов обмена данными. Более того, распределенное управление может быть более эффективным, чем централизованное. Если один из серверов выходит из строя, другие дроны могут продолжать выполнять свои задачи, используя информацию, полученную от других дронов в сети.
Автономное планирование траектории с учетом безопасности
Сложно переоценить значение алгоритмов автономного планирования траектории. Они должны учитывать не только цель полета, но и потенциальные опасности. Важно, чтобы алгоритмы были спроектированы таким образом, чтобы максимально минимизировать риск столкновений и обеспечивать безопасное выполнение задач. В некоторых случаях может потребоваться использование 'консервативных' траекторий, которые хотя и более длинные, но более безопасные. И это не всегда является компромиссом, иногда именно консервативные траектории обеспечивают гораздо более эффективное и надежное выполнение миссии.
Примеры решений на рынке
Рынок **всенаправленных беспилотников для предотвращения столкновений** сейчас находится в стадии активного развития. Некоторые производители предлагают решения, основанные на использовании нескольких датчиков и алгоритмов машинного обучения. Например, некоторые системы используют лидары для создания трехмерной карты окружающей среды и предупреждают пилота о возможных препятствиях. Другие системы используют радары для обнаружения дронов в плохих погодных условиях. Особое внимание уделяется разработке алгоритмов, которые позволяют дронам самостоятельно принимать решения о том, как избежать столкновения.
К сожалению, не все решения одинаково эффективны. Некоторые из них показывают хорошие результаты в лабораторных условиях, но при работе в реальных условиях могут давать сбой. Важно тщательно тестировать решения в различных сценариях, прежде чем внедрять их в эксплуатацию. Мы сами несколько раз сталкивались с ситуацией, когда 'продвинутая' система обхода препятствий просто блокировала дрон, не позволяя ему продолжить выполнение задачи. Порой самые простые решения оказываются наиболее надежными.
Вызовы и перспективы
Несмотря на значительный прогресс в этой области, остается еще много вызовов. Одним из главных – это обеспечение надежности и отказоустойчивости систем. Столкновение дронов может иметь серьезные последствия, поэтому системы должны быть спроектированы таким образом, чтобы исключить возможность возникновения аварийных ситуаций.
Кроме того, необходимо разработать стандарты и правила для управления воздушным пространством, в котором будут учитываться особенности применения беспилотников. Это позволит обеспечить безопасное и эффективное использование дронов и предотвратить возникновение конфликтов между различными участниками воздушного движения.
Я думаю, что в ближайшем будущем мы увидим появление более сложных и интеллектуальных систем **предотвращения столкновений**. Эти системы будут использовать искусственный интеллект и машинное обучение для прогнозирования возможных опасностей и принятия адекватных решений. И, конечно, развитие этой области будет зависеть от развития других технологий, таких как 5G и блокчейн. Эти технологии могут обеспечить более надежную и безопасную связь между дронами и центральной системой управления. ООО Технологии беспилотных летательных аппаратов Хунань Юхан (https://www.uavhunan.ru) активно работает над этими вопросами, и мы верим, что в скором времени сможем предложить нашим клиентам решения, которые обеспечат максимальную безопасность при использовании беспилотных летательных аппаратов.
Соответствующая продукция
Соответствующая продукция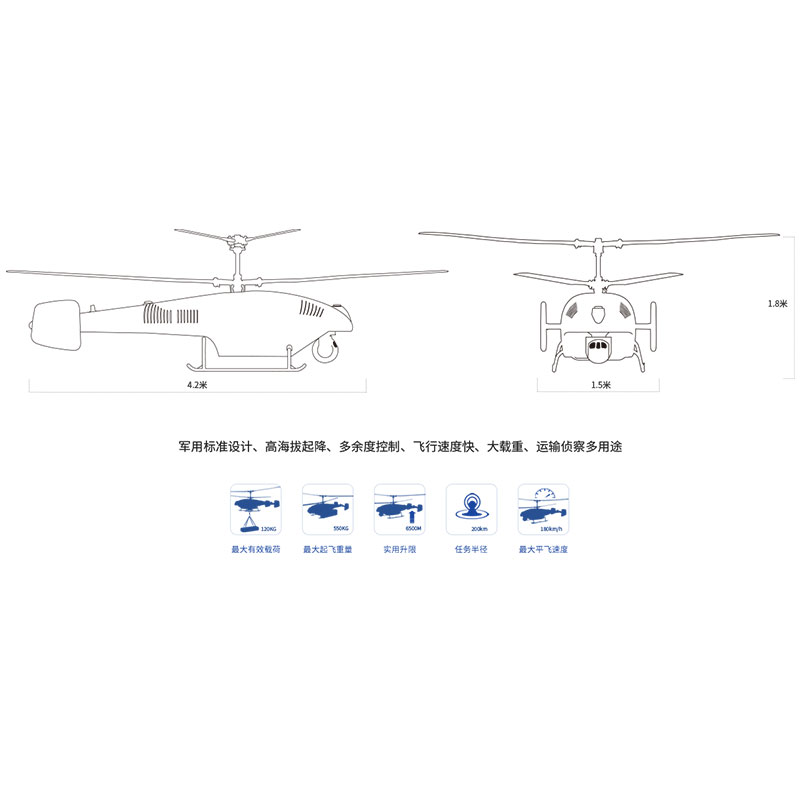





Самые продаваемые продукты
Самые продаваемые продукты-
 Большой беспилотный вертолет T1200
Большой беспилотный вертолет T1200 -
 Коробка для размотки оптоволокна 30000M
Коробка для размотки оптоволокна 30000M -
 Промышленный БПЛА Matrix M30T
Промышленный БПЛА Matrix M30T -
 DJI все-в-одном мини воздушный дрон mini4pro
DJI все-в-одном мини воздушный дрон mini4pro -
 DM2 Модуль обнаружения дронов
DM2 Модуль обнаружения дронов -
 Коробка для размотки оптоволокна 1-20kM
Коробка для размотки оптоволокна 1-20kM -
 DJI мини беспроводной микрофон DJI Mic Mini
DJI мини беспроводной микрофон DJI Mic Mini -
 Профессиональная аэрофотосъемочная камера DJI Zenmuse P1
Профессиональная аэрофотосъемочная камера DJI Zenmuse P1 -
 DJI воздушный дрон для влоггинга flip
DJI воздушный дрон для влоггинга flip -
 Высокопроизводительное осветительное оборудование DJI AL1 прожектор
Высокопроизводительное осветительное оборудование DJI AL1 прожектор -
 Коробка для размотки оптоволокна 35000M
Коробка для размотки оптоволокна 35000M -
 DJI флагманский беспилотник с двойной камерой air3s
DJI флагманский беспилотник с двойной камерой air3s
Связанный поиск
Связанный поиск- шуя дроны
- Ведущий китайский покупатель промышленных дронов
- Цена на 3D реконструкцию
- Топ покупателей загружаемых беспилотников из Китая
- Ведущий покупатель портативных зарядных станций OEM
- Ведущие цены на дроны профессионального уровня
- Цены на необслуживаемые аэропорты DJI
- Промышленные дроны
- Ведущая страна по продаже профессиональных дронов DJI
- портативная электростанция для дома