




Поставщики оборудования для позиционирования беспилотников
Сразу скажу, что тема оборудования для позиционирования беспилотников сейчас очень горячая. Многие, особенно новички в этой сфере, ищут 'волшебную таблетку', готовое решение, которое решит все проблемы. Искать просто поставщиков – это, конечно, шаг, но часто забывают, что это только начало. Важно понимать, что выбор системы позиционирования – это сложный процесс, зависящий от множества факторов, которые не всегда очевидны на первый взгляд. И, честно говоря, я видел много 'волшебных таблеток', которые разбивались о реальность при первой же эксплуатации.
Что на самом деле нужно знать при выборе системы GPS/GNSS для БПЛА
Вопрос часто сводится к выбору между различными типами приемников – от базовых GPS до сложных RTK (Real-Time Kinematic) и PPK (Post-Processed Kinematic) систем. Но здесь важно не только техническое понимание, но и понимание специфики применения. Для сельскохозяйственных нужд, где требуется высокая точность при обработке полей, PPK может быть оправданным выбором. Для более простых задач, например, для патрулирования территорий или выполнения фотосъемки, достаточно RTK. Но, опять же, 'достаточно' – это понятие относительное. Слишком мощная система будет излишней и дорогой, а слишком слабая – не обеспечит требуемую точность.
Еще один момент, который часто упускают из виду, – это влияние помех. В городских условиях, в густой лесистой местности, или вблизи электромагнитных источников GPS-сигнал может быть значительно ослаблен или искажен. В таких случаях, использование дополнительного оборудования, например, инерциальных измерительных блоков (IMU) или систем визуальной одометрии, становится необходимым. Но опять же, это увеличивает сложность и стоимость системы.
Опыт работы с различными производителями
В течение последних нескольких лет мы работали с несколькими поставщиками, предлагающими различные решения в области систем точного позиционирования. Среди них – Trimble, Pixhawk (хотя это скорее платформа, чем полноценный поставщик готовых решений), NovAtel, и российские производители. Каждый из них имеет свои сильные и слабые стороны.
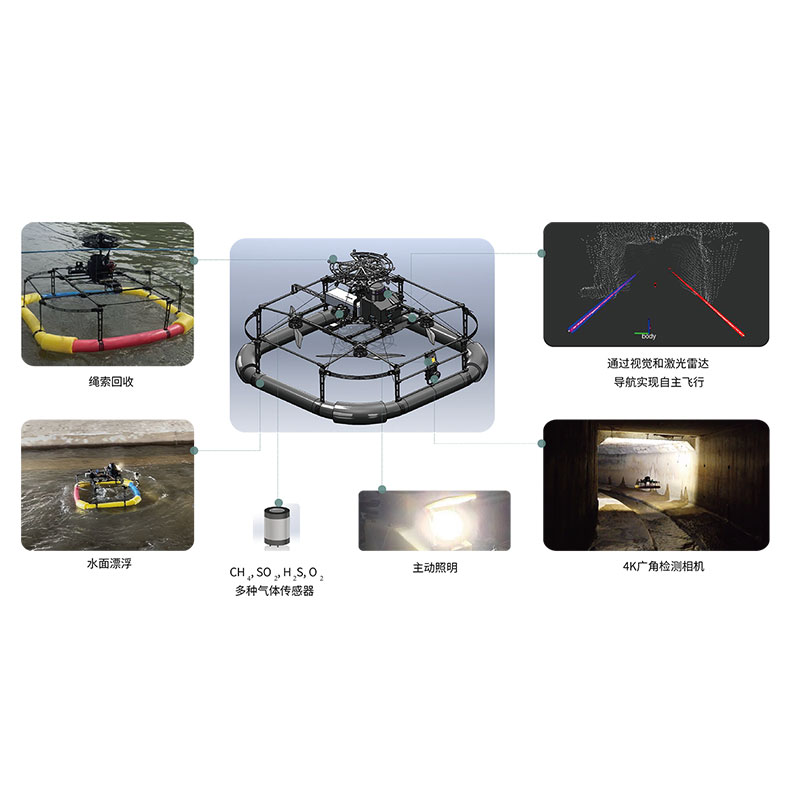
Trimble – это, безусловно, лидер рынка, предлагающий самые современные и точные системы. Но их решения, как правило, довольно дорогие. Pixhawk, с другой стороны, предлагает более доступный вариант, но требует больше усилий для настройки и калибровки. NovAtel – это хороший компромисс между ценой и качеством. Российские производители постепенно наращивают свои мощности и предлагают интересные решения, особенно для задач, требующих высокой надежности в сложных условиях. Например, системы от OOO Технологии беспилотных летательных аппаратов Хунань Юхан (https://www.uavhunan.ru) показывают неплохие результаты при автономном полете в условиях ограниченной GPS-видимости.
Проблемы калибровки и интеграции
Процесс калибровки системы позиционирования беспилотников – это, пожалуй, самый трудоемкий этап. Калибровка включает в себя определение погрешностей приемника, компенсацию ошибок, связанных с наклоном и вращением дрона. И здесь часто возникают проблемы. Например, мы столкнулись с ситуацией, когда после калибровки RTK-система продолжала показывать систематическую ошибку в несколько метров. Пришлось проводить повторную калибровку, используя более сложные алгоритмы и инструменты. В конечном итоге, причина оказалась в неточном определении географических координат контрольных точек при калибровке.
Интеграция GPS/GNSS с другими системами управления дроном – это тоже нетривиальная задача. Необходимо обеспечить совместимость между различными компонентами системы, а также разработать алгоритмы, которые позволят эффективно использовать информацию, полученную от приемника. Например, мы разрабатывали систему, которая объединяла данные от GPS, IMU и барометра для повышения точности позиционирования дрона в условиях сложной атмосферной обстановки. Эта система оказалась довольно сложной в реализации, но результат стоил того.
Альтернативные подходы: использование сети базовых станций
Еще один подход к повышению точности позиционирования – использование сети базовых станций. Вместо того, чтобы полагаться только на GPS-сигнал, дрон может получать информацию от нескольких базовых станций, расположенных в разных точках местности. Это позволяет значительно снизить погрешность позиционирования, особенно в условиях ограниченной GPS-видимости. Но, естественно, этот подход требует значительных затрат на создание и обслуживание сети базовых станций.
В последние годы наблюдается рост популярности облачных сервисов, предлагающих услуги по обработке данных от спутников и предоставлению информации о местоположении дронов. Эти сервисы могут быть полезны для задач, требующих высокой точности и надежности, но, конечно, они требуют постоянного подключения к интернету. Выбор между различными подходами зависит от конкретных задач и бюджета.
Выводы и рекомендации
В заключение хочу сказать, что выбор оборудования для позиционирования беспилотников – это сложная и многогранная задача. Не стоит полагаться на готовые решения без тщательного анализа и оценки своих потребностей. Важно понимать, что нет универсального решения, которое подходит для всех случаев. Нужно учитывать специфику применения, условия эксплуатации, бюджет и другие факторы.
Рекомендую начинать с тщательного анализа требований к точности и надежности позиционирования. Затем, на основе этих требований, выбирать наиболее подходящую систему и поставщика. Не забывайте о необходимости калибровки и интеграции оборудования с другими системами управления дроном. И, конечно, не бойтесь экспериментировать и искать новые решения. В этой сфере постоянно появляются новые технологии и подходы, которые могут помочь повысить эффективность использования беспилотных летательных аппаратов.
Соответствующая продукция
Соответствующая продукция







Самые продаваемые продукты
Самые продаваемые продукты-
 Полностью автоматизированная работа DJI Аэропорт 3
Полностью автоматизированная работа DJI Аэропорт 3 -
 Q100 Сельскохозяйственный дрон
Q100 Сельскохозяйственный дрон -
 Многофункциональная базовая станция DJI-RTK3
Многофункциональная базовая станция DJI-RTK3 -
 Коробка для размотки оптоволокна 45000M
Коробка для размотки оптоволокна 45000M -
 D2C Устройство для обнаружения и управления беспилотниками, устанавливаемое на транспортном средстве
D2C Устройство для обнаружения и управления беспилотниками, устанавливаемое на транспортном средстве -
 DJI Легкий самодельный стабилизатор DJI RS 4 Mini
DJI Легкий самодельный стабилизатор DJI RS 4 Mini -
 Коробка для размотки оптоволокна 2000M
Коробка для размотки оптоволокна 2000M -
 DJI HD ручной влоггинг воздушный дрон neo
DJI HD ручной влоггинг воздушный дрон neo -
 Коробка для размотки оптоволокна 1-20kM
Коробка для размотки оптоволокна 1-20kM -
 Воздушный терминал 1
Воздушный терминал 1 -
 DJI First View Траверсный дрон avata2
DJI First View Траверсный дрон avata2 -
 DJI HD профессиональный воздушный дрон mavic3pro
DJI HD профессиональный воздушный дрон mavic3pro
Связанный поиск
Связанный поиск- Ведущие страны-покупатели автоматизированных инспекционных дронов в Китае
- Китайские новости о беспилотниках
- Поставщики OEM DJI профессиональных беспилотников
- Ведущая портативная автономная электростанция
- Поставщики OEM разведывательные беспилотники
- Завод для дрона 3
- Знаменитые редакторы 3D-моделей
- Купить новости о дронах
- Производитель интеллектуальных спортивных камер
- внешняя электростанция портативная