




Поставщики OEM Интеллектуальный БПЛА для предотвращения столкновений с препятствиями
Все чаще слышишь про беспилотники с автоматическим уклонением от препятствий. Кажется, это уже стандарт де-факто, словно решает все проблемы. Но на деле, внедрение надежной системы предотвращения столкновений – это не просто установка датчиков и программного обеспечения, это целая комплексная задача, требующая глубокого понимания ситуации и опыта. Многие заказчики, стремясь к минимальной цене, выбирают самые простые решения, что в итоге приводит к разочарованиям и необходимости переделок. Попытался поделиться своим взглядом, основанным на практике работы с интеллектуальными БПЛА.
Проблема: не только датчики, но и обработка данных
Самая распространенная ошибка – переоценка возможностей стандартных датчиков. Да, ультразвуковые и лидары позволяют обнаруживать препятствия, но их эффективность сильно зависит от окружающей среды. Например, в условиях плохой видимости, тумана или в густой листве – надежность сильно падает. Кроме того, просто обнаружить препятствие недостаточно. Необходимо правильно интерпретировать данные с датчиков, оценить расстояние до объекта, определить вероятность столкновения и, главное, оперативно задействовать систему уклонения.
Ранее мы сталкивались с заказом на разработку БПЛА для инспекции линий электропередач. Заказчик хотел получить максимально дешевое решение. В итоге, выбрали недорогие датчики и простую алгоритмическую систему. В процессе тестирования выяснилось, что в условиях сильного ветра и переменной освещенности БПЛА регулярно врезался в провода. Пришлось полностью переделывать систему, добавлять более надежные датчики, улучшать алгоритмы обработки данных и проводить дополнительные испытания. Вот где экономия обернулась большими затратами и задержкой проекта.
Выбор датчиков: компромисс между стоимостью и надежностью
Выбор датчиков – это всегда компромисс. Лидары обеспечивают высокую точность, но они значительно дороже ультразвуковых датчиков. Камеры позволяют получать визуальную информацию об окружающей среде, но требуют значительных вычислительных ресурсов для обработки изображений. Выбор конкретного типа датчиков зависит от задач, бюджета и требуемого уровня надежности. Не стоит забывать и о принципе Redundancy – добавление резервных датчиков, чтобы при отказе одного из них система продолжала функционировать. Мы часто применяем комбинацию ультразвуковых датчиков для ближней дистанции и лидара для более дальнего обзора. Это обеспечивает хорошую надежность при разумной стоимости.
В последнее время наблюдается тенденция к использованию более продвинутых датчиков, таких как мультиспектральные камеры и датчики глубины на основе стереозрения. Они позволяют получать более полную информацию об окружающей среде и повышают надежность системы предотвращения столкновений. Однако, эти датчики пока еще довольно дороги и требуют серьезной разработки программного обеспечения для обработки данных.
Решение: комплексный подход к безопасности полета
Хорошая система предотвращения столкновений – это не просто набор датчиков, это комплексная система, включающая в себя аппаратную и программную составляющие. Важно учитывать множество факторов, таких как скорость полета, углы атаки, погодные условия и особенности местности. Программное обеспечение должно быть оптимизировано для работы в реальном времени и способно быстро реагировать на изменяющиеся условия.
Мы разрабатываем системы безопасности полета с учетом различных сценариев использования БПЛА. Например, для сельского хозяйства – необходимо учитывать высоту посевов и наличие деревьев. Для инспекции инфраструктуры – – нужно учитывать наличие линий электропередач и других объектов. При разработке БПЛА для предотвращения столкновений мы всегда уделяем особое внимание тестированию и валидации системы в различных условиях.
Программное обеспечение: алгоритмы и машинное обучение
Программное обеспечение – это 'мозг' системы предотвращения столкновений. Оно отвечает за обработку данных с датчиков, принятие решений об уклонении от препятствий и управление двигателями БПЛА. Алгоритмы должны быть достаточно точными и надежными, чтобы избежать ложных срабатываний и неэффективных маневров. Кроме того, стоит использовать методы машинного обучения для повышения адаптивности системы к изменяющимся условиям.
Сейчас мы активно экспериментируем с алгоритмами, основанными на глубоком обучении. Они позволяют БПЛА обучаться на больших объемах данных и самостоятельно определять оптимальную траекторию уклонения от препятствий. Это значительно повышает надежность и эффективность системы. Но это требует значительных вычислительных ресурсов и хорошо обученных специалистов.
Практический пример: инспекция ветропарка
Недавно мы участвовали в проекте по инспекции ветропарка. Заказчик хотел использовать БПЛА для регулярного осмотра лопастей ветряных турбин. Основная задача – обнаружение трещин и других повреждений. Для этого была разработана система предотвращения столкновений, которая позволяла БПЛА безопасно облетать турбины и проводить детальную фотосъемку лопастей.
В процессе тестирования мы столкнулись с проблемой – при сильном ветре БПЛА начинал отклоняться от запланированной траектории. Это было вызвано неточностью данных о скорости ветра и неэффективностью алгоритмов управления. Пришлось доработать алгоритмы управления и добавить датчик ветра. В итоге, мы смогли разработать надежную систему, которая позволяет БПЛА безопасно и эффективно проводить инспекцию ветропарка.
Ошибки при внедрении: частые ошибки и как их избежать
Мы выявили несколько типичных ошибок при внедрении систем предотвращения столкновений. Одна из самых распространенных – недостаточная проверка системы в различных условиях. Необходимо тестировать систему в различных погодных условиях, при разной освещенности и на разных типах местности. Еще одна ошибка – неправильная калибровка датчиков. Датчики должны быть откалиброваны с высокой точностью, чтобы обеспечить надежную работу системы.
Не стоит забывать и о необходимости регулярного обслуживания системы. Датчики могут нуждаться в очистке или замене, а программное обеспечение – в обновлении. Регулярное обслуживание поможет поддерживать систему в рабочем состоянии и избежать неожиданных сбоев. Мы предлагаем комплексные услуги по обслуживанию интеллектуального БПЛА.
Будущее: автономность и адаптивность
На будущее можно ожидать дальнейшего развития систем предотвращения столкновений. БПЛА станут более автономными и способными самостоятельно принимать решения в сложных ситуациях. Системы будут адаптироваться к изменяющимся условиям и обучаться на собственных ошибках. Мы верим, что беспилотные летательные аппараты станут незаменимым инструментом во многих областях, от инспекции инфраструктуры до сельского хозяйства и логистики. Разработка надежной системы предотвращения столкновений – ключевой фактор для успешного внедрения БПЛА в широкое применение. Мы в OOO Технологии беспилотных летательных аппаратов Хунань Юхан продолжаем развиваться в этом направлении, опираясь на многолетний опыт и глубокие знания.
Соответствующая продукция
Соответствующая продукция








Самые продаваемые продукты
Самые продаваемые продукты-
 D2C Устройство для обнаружения и управления беспилотниками, устанавливаемое на транспортном средстве
D2C Устройство для обнаружения и управления беспилотниками, устанавливаемое на транспортном средстве -
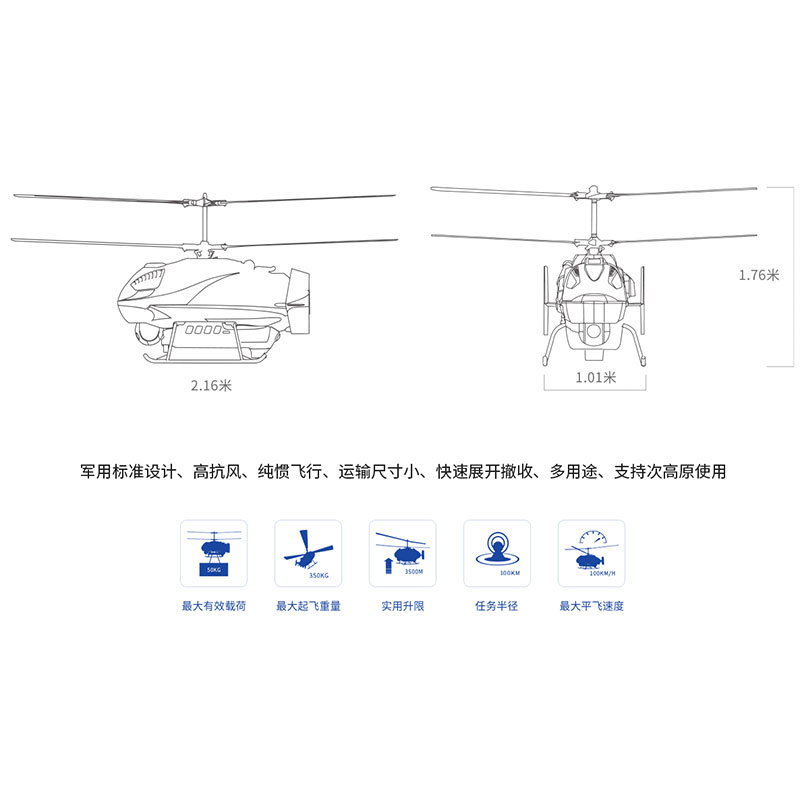 Соосный малый беспилотный вертолет TD220
Соосный малый беспилотный вертолет TD220 -
 Коробка для размотки оптоволокна 1000M
Коробка для размотки оптоволокна 1000M -
 DJI все-в-одном мини воздушный дрон mini4pro
DJI все-в-одном мини воздушный дрон mini4pro -
 DJI Спортивная камера Osmo Action 5 Pro
DJI Спортивная камера Osmo Action 5 Pro -
 Сельскохозяйственный беспилотный летательный аппарат DJI T70
Сельскохозяйственный беспилотный летательный аппарат DJI T70 -
 JM2 Оборудование для точного стационарного противодействия дронам
JM2 Оборудование для точного стационарного противодействия дронам -
 DJI мини беспроводной микрофон mic2
DJI мини беспроводной микрофон mic2 -
 Программное обеспечение для редактирования 3D-моделей DJI Жимо
Программное обеспечение для редактирования 3D-моделей DJI Жимо -
 Воздушный терминал 1
Воздушный терминал 1 -
 Беспилотные летательные аппараты DJI промышленного класса Matrice350RTK
Беспилотные летательные аппараты DJI промышленного класса Matrice350RTK -
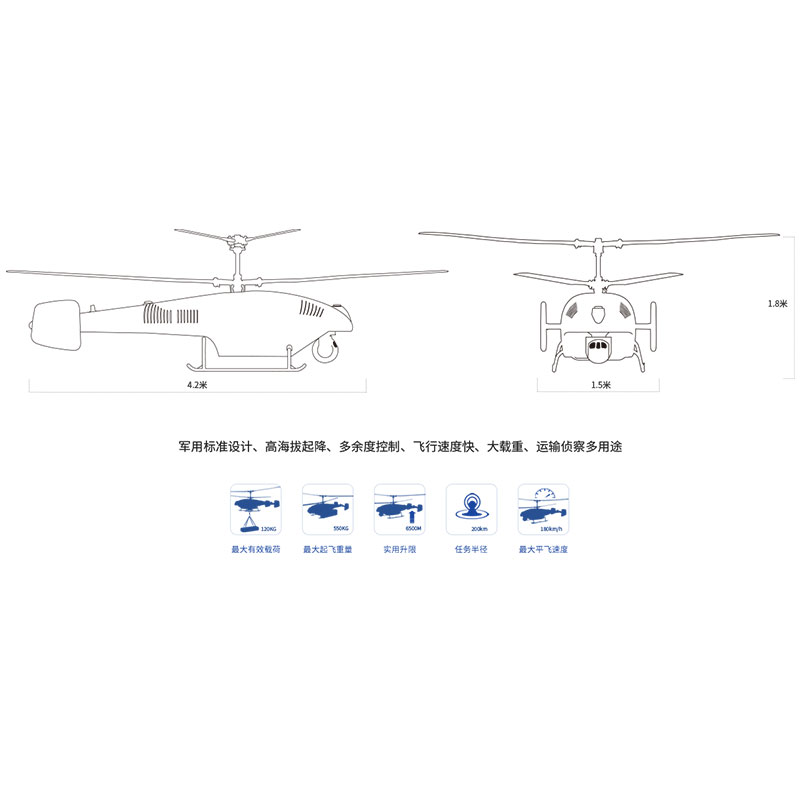 Большой грузовой беспилотный вертолет TD550
Большой грузовой беспилотный вертолет TD550
Связанный поиск
Связанный поиск- Производитель отличных волоконно-оптических коробок устойчивых к растяжению и истиранию
- Завод беспилотников с экранами
- Поставщики беспилотников для инспекции трубопроводов
- Цена чтобы купить инфракрасный дрон обнаружения
- Ведущий покупатель портативных источников питания мощностью 200 Вт
- Поставщики беспилотников OEM сегодня
- Разведывательный дрон
- Цена спортивной камеры спорт
- Отличный производитель автоматизированных инспекционных беспилотников
- Купить Дрон сверхдальнего действия