




Производитель беспилотных летательных аппаратов с всенаправленным обходом препятствий
По сути, задача беспилотных летательных аппаратов с всенаправленным обходом препятствий (ВПЛА с всенаправленной навигацией) – это не просто избежать столкновения. Речь идет о создании гибкого и надежного алгоритма, позволяющего аппарату адаптироваться к непредсказуемой среде. На рынке много решений, но их эффективность часто сомнительна, особенно в реальных условиях. И это не всегда про дорогостоящие сенсоры, хотя они, безусловно, важны. Часто проблема кроется в программном обеспечении, в его способности интерпретировать данные и принимать адекватные решения в доли секунды.
Основные вызовы и подходы
Первый вопрос, который встает – какие сенсоры использовать? Лидары – да, дают точные данные о расстоянии, но дороги и чувствительны к погодным условиям. Камеры – дешевле, но требуют сложных алгоритмов компьютерного зрения. Соноры – неплохой вариант для ближнего обзора, но не очень хороши для больших расстояний. Комбинированные решения (лидар + камера + соноры) – самый распространенный подход, но и самый дорогой. И вот здесь начинается самое интересное – как интегрировать данные с разных сенсоров, чтобы получить единую картину мира?
Помню один проект, где мы пытались использовать только камеры и глубокое обучение для создания системы обхода препятствий. В теории, это звучало очень привлекательно – дешево и сердито. На практике же оказалось, что алгоритм слишком чувствителен к изменениям освещения и текстуры поверхности. В итоге, мы отказались от этого подхода и перешли к комбинированному решению с лидаром и камерами, добавив фильтры для компенсации помех.
Необходимость адаптации алгоритма к условиям эксплуатации
Очень часто разработчики сосредотачиваются на идеальных сценариях, забывая о том, что реальность гораздо сложнее. Например, как ведет себя алгоритм в условиях сильного ветра или плотной заслонки? Как он реагирует на неожиданное появление объекта в поле зрения? Эти вопросы нужно учитывать при проектировании системы. Это не просто про математику и алгоритмы, это про понимание физики движения аппарата и его взаимодействия с окружающим миром.
Наше практическое применение и полученный опыт
В компании UAV Hunan (https://www.uavhunan.ru/) мы активно занимаемся разработкой систем беспилотных летательных аппаратов с всенаправленной навигацией. Мы работаем с широким спектром дронов – от небольших для любительской съемки до крупных для промышленного инспектирования. Особое внимание уделяем надежности и безопасности аппаратов.
Например, в рамках проекта по инспекции линий электропередач нам пришлось разработать систему, которая могла автономно облетать опоры и выявлять повреждения. Система включала в себя лидар для создания 3D-карты местности и камеру для визуального анализа. Мы использовали алгоритмы SLAM (Simultaneous Localization and Mapping) для одновременной локализации аппарата и построения карты окружения. Изначально мы использовали готовые библиотеки, но быстро поняли, что они не совсем подходят для наших задач. Пришлось писать собственные алгоритмы, которые учитывали специфические особенности местности и условия освещения. Поначалу возникали проблемы с точностью определения положения аппарата, но после оптимизации алгоритма и добавления фильтров удалось добиться приемлемых результатов.
Проблемы с обработкой данных в реальном времени
Одной из самых больших проблем является обработка огромного объема данных в реальном времени. Алгоритмы обхода препятствий должны работать достаточно быстро, чтобы аппарат мог среагировать на изменение обстановки. Для этого необходимы мощные вычислительные ресурсы и оптимизированный код. Мы используем GPU для ускорения обработки данных, но даже это не всегда достаточно. Часто приходится идти на компромиссы между точностью и скоростью.
Более того, необходимо учитывать возможные ошибки сенсоров и погрешности алгоритмов. Система обхода препятствий не должна реагировать на ложные срабатывания. Например, случайно появившийся лист бумаги не должен заставить аппарат резко изменить курс. Для этого используются различные методы фильтрации и верификации данных.
Будущие тенденции и перспективы
В будущем, я думаю, мы увидим все большую интеграцию искусственного интеллекта в системы беспилотных летательных аппаратов с всенаправленной навигацией. Алгоритмы машинного обучения позволят аппаратам лучше понимать окружающую среду и принимать более обоснованные решения. Например, аппарат сможет самостоятельно определять, какие препятствия представляют наибольшую угрозу и как лучше их обойти.
Еще одним важным направлением является разработка более компактных и энергоэффективных сенсоров. Это позволит создавать более легкие и маневренные аппараты с увеличенным временем полета. Кроме того, будет развиваться технология беспроводной связи, что позволит управлять аппаратами на больших расстояниях и передавать данные в режиме реального времени.
Этические аспекты и вопросы безопасности
Нельзя забывать и об этических аспектах, связанных с использованием беспилотных летательных аппаратов. Необходимо разрабатывать алгоритмы, которые обеспечивают безопасность окружающих людей и объектов. Например, аппарат не должен врезаться в здания или нарушать частную жизнь граждан. Также важно обеспечить надежную защиту от хакерских атак и других угроз безопасности.
UAV Hunan активно работает над созданием безопасных и надежных систем беспилотных летательных аппаратов с всенаправленной навигацией, соответствующих самым высоким стандартам. Мы считаем, что будущее беспилотной авиации связано с разработкой интеллектуальных и автономных аппаратов, которые могут работать в сложных и непредсказуемых условиях.
Соответствующая продукция
Соответствующая продукция







Самые продаваемые продукты
Самые продаваемые продукты-
 Воздушный терминал 1
Воздушный терминал 1 -
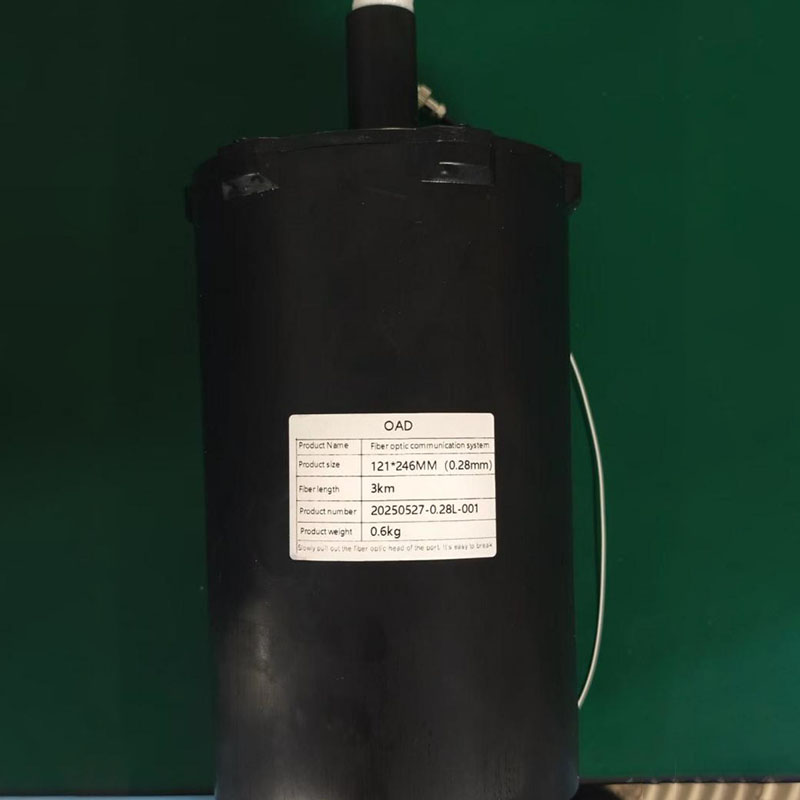 Коробка для размотки оптоволокна 3000M
Коробка для размотки оптоволокна 3000M -
 DJI Спортивная камера Osmo Action 3
DJI Спортивная камера Osmo Action 3 -
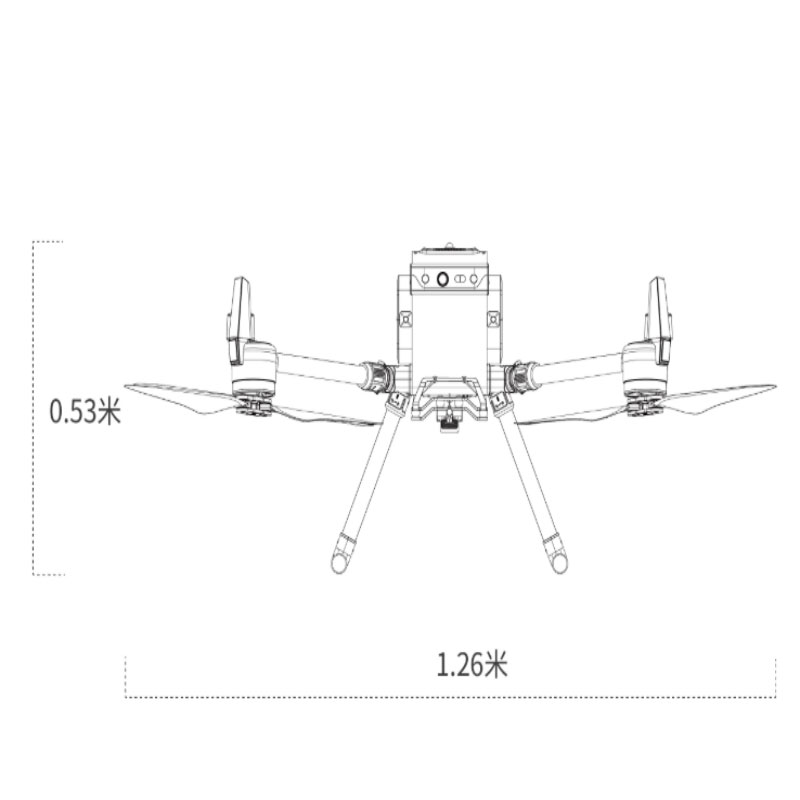
 DJI флагманский беспилотник с двойной камерой air3s
DJI флагманский беспилотник с двойной камерой air3s -
 Коробка для размотки оптоволокна 10000M
Коробка для размотки оптоволокна 10000M -
 Программное обеспечение для 3D-реконструкции DJI Maps
Программное обеспечение для 3D-реконструкции DJI Maps -
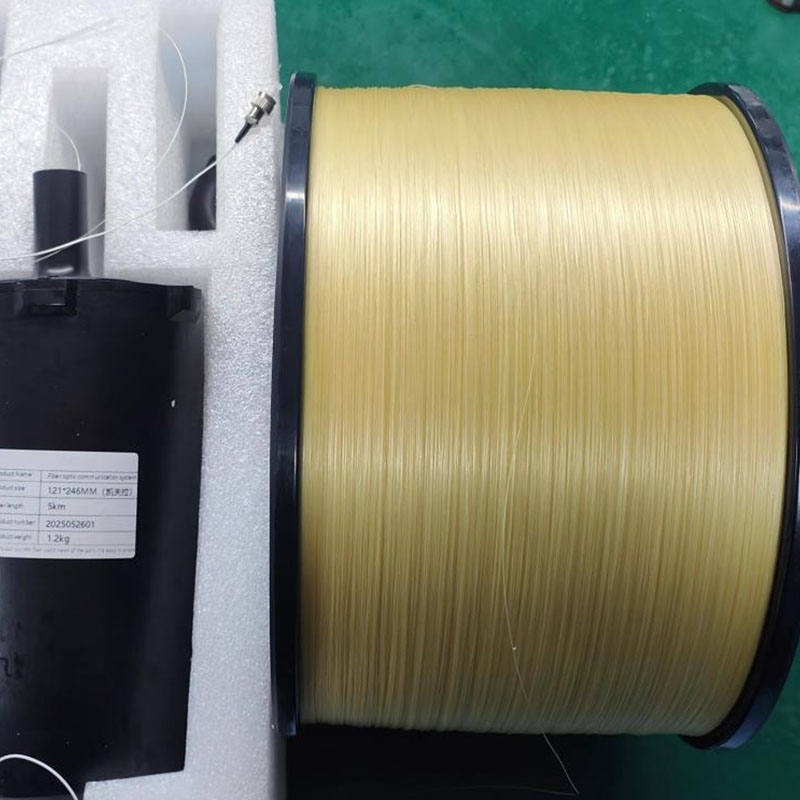 Коробка для размотки оптоволокна 1-20kM
Коробка для размотки оптоволокна 1-20kM -
 DJI воздушный дрон для влоггинга flip
DJI воздушный дрон для влоггинга flip -
 H2L Ручное оборудование для обнаружения и позиционирования дронов
H2L Ручное оборудование для обнаружения и позиционирования дронов -
 DJI мини беспроводной микрофон mic2
DJI мини беспроводной микрофон mic2 -
 Наземный терминал 1
Наземный терминал 1 -
 Облачная платформа управления DJI Сиконг 2
Облачная платформа управления DJI Сиконг 2
Связанный поиск
Связанный поиск- Поставщики беспроводных микрофонов DJI Mic Mini
- Оптовые производители обнаружения дронов
- Купить производителя Дрон 2025
- Купить Полностью автоматическое управление дроном
- Оптовая всенаправленный дрон избежания препятствий
- Высококачественный портативный источник питания 200 Вт
- Цены на портативные электростанции на 220 аккумуляторов
- Ведущий покупатель оптовых полетов дронов
- Топ-компании для интеллектуальных разведывательных беспилотников
- Оптовые производители инспекционных дронов