




Производитель БПЛА с интеллектуальным возвращением домой
Понятие БПЛА с интеллектуальным возвращением домой в последнее время стало очень популярным. Часто это звучит как нечто футуристическое, словно из научной фантастики. Но на практике, это, конечно, не панацея. И хотя современные системы возврата домой значительно продвинулись, проблем и нюансов, которые нужно учитывать при разработке и внедрении, остается немало. В последнее время мы в компании активно работаем над этой задачей, и вот что мы поняли.
Что такое 'интеллектуальное возвращение домой'?
Под 'интеллектуальным возвращением домой' я подразумеваю не просто автоматический возврат к стартовой точке. Это комплексная система, включающая в себя определение местоположения, планирование оптимального маршрута, учет погодных условий и препятствий, а также возможность адаптации к изменяющейся ситуации. То есть, это не 'бросить и забыть', а система, которая постоянно оценивает риски и принимает решения.
Просто 'запустить возврат по сигналу' – это наименьшее из зол. Например, часто возникают ситуации, когда БПЛА возвращается, но не туда, куда нужно, потому что алгоритм не учитывает, например, сильный боковой ветер. Или система не способна определить оптимальный путь, если рядом есть плотные линии электропередач. Такие недочеты в конечном итоге приводят к потере аппарата, что, естественно, недопустимо.
Мы сталкивались с ситуацией, когда у клиента, занимающегося мониторингом линий электропередач, БПЛА возвращался на территорию, где была плохая связь, и терял сигнал. Потом он просто 'висел' на одном месте, не двигаясь. Пришлось разрабатывать специальный алгоритм, который учитывает уровень сигнала и корректирует маршрут возврата, обходя зоны с плохой связью. Это, опять же, не просто 'автоматика', а постоянная работа над улучшением системы.
Технические сложности и их решения
Ключевая проблема – это точная геолокация. GPS, конечно, хорошо работает в открытых пространствах, но в городских условиях, в лесу или в помещении – совершенно бесполезен. Поэтому, для надежного возвращения домой необходимо использовать комбинацию различных систем: GPS/GLONASS, инерциальные датчики (IMU), барометры, камеры с функцией визуальной одометрии. И все это должно быть интегрировано в единую систему.
Кроме того, необходимо учитывать алгоритмы машинного обучения. Например, можно обучить систему распознавать особенности ландшафта и использовать их для более точного определения местоположения. Или обучить систему избегать препятствий, анализируя данные с камеры. На данный момент, это сложная, но перспективная область.
В нашей компании мы активно используем данные, полученные от датчиков, для создания более точных карт местности. Это позволяет нам улучшить алгоритмы планирования маршрута и избежать нештатных ситуаций. Мы постоянно работаем над оптимизацией энергопотребления системы, чтобы продлить время полета и увеличить радиус действия систем возврата домой.
Инерциальная навигация: Когда GPS не работает
Инерциальная навигация (INS) – важный компонент систем, обеспечивающих возвращение домой. Она основана на измерении ускорения и угловой скорости, которые, интегрируясь во времени, позволяют определить текущее положение и ориентацию аппарата. Проблема INS в том, что со временем накапливаются ошибки, которые приводят к отклонению от заданного курса. Поэтому, INS часто используют в сочетании с другими системами, например, с GPS, для коррекции ошибок.
Мы используем INS с высокой точностью и регулярно калибруем системы. Также, в наших разработках используются алгоритмы фильтрации, которые позволяют минимизировать влияние погрешностей INS. Однако, даже при использовании самых современных технологий, необходимо учитывать, что инерциальная навигация не является абсолютно точной. Поэтому, важно иметь запас по времени и маршруту, чтобы в случае возникновения непредвиденных ситуаций можно было безопасно вернуться.
Препятствия и обход: Сложность реального мира
В реальном мире всегда есть препятствия – деревья, здания, линии электропередач. БПЛА должен уметь их видеть и обходить. Простое следование по заданному маршруту может привести к столкновению и повреждению аппарата. Поэтому, необходимо использовать системы обнаружения препятствий и алгоритмы планирования маршрута, которые позволяют избежать столкновений.
Мы используем различные методы обнаружения препятствий, включая камеры, лидары и ультразвуковые датчики. Каждый из этих методов имеет свои преимущества и недостатки. Камера, например, позволяет получать визуальную информацию об окружающей среде, но может быть затруднена плохими погодными условиями. Лидар обеспечивает высокую точность обнаружения препятствий, но является дорогим и сложным в интеграции. Ультразвуковые датчики используются для обнаружения препятствий на небольшом расстоянии, например, при посадке.
Разработка алгоритмов обхода препятствий – это сложная задача. Необходимо учитывать не только наличие препятствий, но и их размер, форму и расположение. Также, необходимо учитывать динамику полета аппарата и возможность выполнения маневров обхода. Наши алгоритмы обхода препятствий основаны на комбинации различных методов планирования маршрута, включая A* и RRT. Они позволяют нам находить оптимальные маршруты, избегая столкновений и минимизируя время полета.
Ошибки и неудачные попытки
Мы не всегда добиваемся успеха с первой попытки. Были проекты, когда автоматический возврат домой завершался неудачей из-за неверной оценки ситуации. Например, однажды БПЛА попытался вернуться в густой лес, где связь была очень слабой, и оказался в ловушке. Пришлось вручную управлять аппаратом и вытаскивать его из леса.
Или был случай, когда система не смогла адаптироваться к внезапному изменению ветра. БПЛА отклонился от маршрута и потерял ориентацию. Пришлось перехватывать управление и возвращать аппарат домой вручную. Эти случаи, конечно, неприятны, но они помогают нам улучшать наши системы и делать их более надежными.
Важно понимать, что безопасность** должна быть приоритетом. И даже если система интеллектуального возвращения домой не всегда работает идеально, она все равно лучше, чем отсутствие такой системы вообще. Мы постоянно работаем над улучшением наших систем и стремимся к тому, чтобы они были максимально надежными и безопасными.
Заключение
В заключение, хочется сказать, что БПЛА с интеллектуальным возвращением домой – это не просто модный тренд, а реальная необходимость для многих приложений. Однако, для реализации этой задачи необходимо учитывать множество технических и практических аспектов. Важно использовать комбинацию различных систем и алгоритмов, а также постоянно тестировать и улучшать системы, чтобы обеспечить их надежность и безопасность. В нашей компании мы придерживаемся именно такого подхода и уверены, что в будущем системы возврата домой станут еще более совершенными и надежными.
Для более подробной информации о наших разработках по управлению БПЛА, вы можете посетить наш сайт: https://www.uavhunan.ru.
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
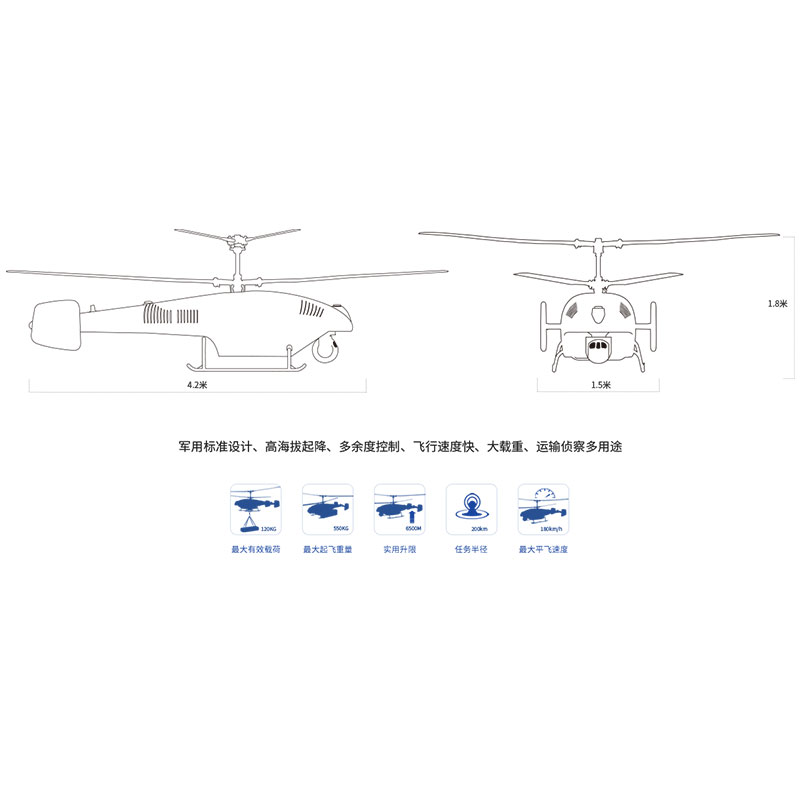 Большой грузовой беспилотный вертолет TD550
Большой грузовой беспилотный вертолет TD550 -
 Большой беспилотный вертолет T1200
Большой беспилотный вертолет T1200 -
 DJI все-в-одном мини воздушный дрон mini4pro
DJI все-в-одном мини воздушный дрон mini4pro -
 Многофункциональная базовая станция DJI-RTK3
Многофункциональная базовая станция DJI-RTK3 -
 X1D TDOA+AOA Устройство позиционирования слияния
X1D TDOA+AOA Устройство позиционирования слияния -
 DJI Легкий самодельный стабилизатор DJI RS 4 Mini
DJI Легкий самодельный стабилизатор DJI RS 4 Mini -
 DJI Спортивная камера Osmo Action 3
DJI Спортивная камера Osmo Action 3 -
 Высокоэффективное звукоусиливающее оборудование AS1 Шутер
Высокоэффективное звукоусиливающее оборудование AS1 Шутер -
 Коробка для размотки оптоволокна 5000M
Коробка для размотки оптоволокна 5000M -
 Профессиональная аэрофотосъемочная камера DJI Zenmuse P1
Профессиональная аэрофотосъемочная камера DJI Zenmuse P1 -
 Флагманский профессиональный ручной стабилизатор DJI для съемки DJI RS 4 Pro
Флагманский профессиональный ручной стабилизатор DJI для съемки DJI RS 4 Pro -
 Мавик 4про
Мавик 4про
Связанный поиск
Связанный поиск- Ведущий дрон яга
- Дешевые двойной стабилизации Smart спортивная камера
- Поставщики которые покупают картографические беспилотники
- Производитель отличных интеллектуальных разведывательных БПЛА
- Купить аэропорт DJI
- Беспилотный вертолет
- Производитель отличных беспроводных микрофонов lavalier для камер
- Производитель отличных профессиональных ручных гимбалов
- Производитель отличной карманной камеры DJI pocket3
- Высокое качество портативная электростанция внешний аккумулятор